

汽车微波雷达相互干扰问题
电子说
描述
汽车微波雷达主要工作在 24GHz 和 77GHz/79GHz频段。24GHz 雷达频率较低,带宽受限,多用于盲区监测、变道辅助、碰撞预警、自适应巡航和自动泊车等功能。由于发展早成本低,在现今车辆上装备的微波雷达大多是24GHz。目前技术发展趋势是77GHz毫米波雷达,具有带宽更宽、分辨率更高等优势。
微波雷达采用的调制方式是FMCW调频连续波,如下图,FM frequency 代表信号的频率变化,每个周期内频率是三角波(或梯形)。在较短时间内,例如1ms,频率变化范围很大,可达2GHz或5GHz。Baseband代表信号基带的时域波形。FMCW vector是FM信号的I/Q数据矢量图。
雷达接收机对回波信号进行处理,从而确定各目标的距离和速度,处理方法通常有两种,一种是宽带接收机,直接解调I/Q数据,与数字匹配滤波器(发射信号I/Q数据的共轭)运算获得目标探测结果;另一种是窄带接收机,其混频器的本振直接采用发射信号,相当于硬件匹配滤波,在中频分析获取目标探测结果。
随着汽车微波雷达的商用发展,数量增多,在实际道路中的干扰问题逐渐复杂和凸显,可能出现下图所示的情况。
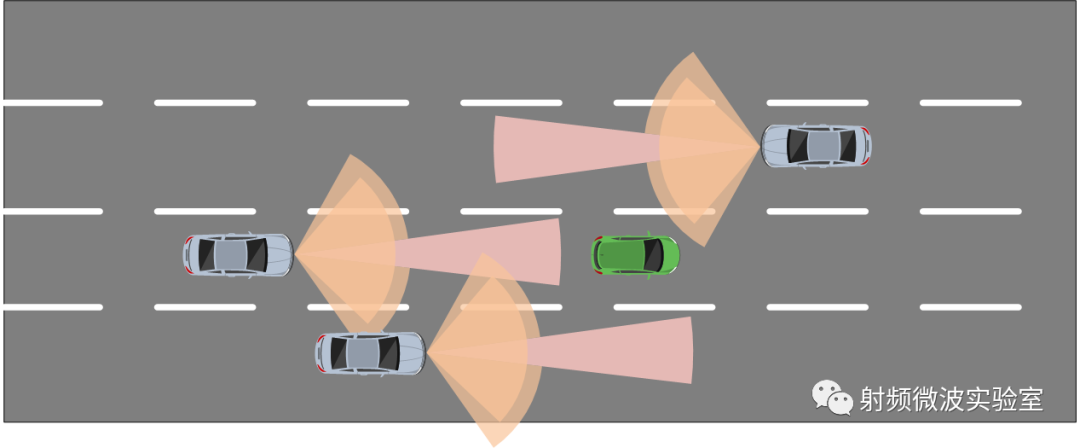
在相对行驶和并行车辆,同型号同调制的各雷达之间毫无疑问会彼此干扰,结果就是所有相互干扰的雷达都会误报甚至无法工作。
目前采用的抗干扰措施,通常是改变FM的时间、周期和调频斜率,这些参数有多种设定值和组合方式。每台雷达采用一个循环内多种参数不同的设置和组合,完全相同参数设置的汽车雷达在道路上相遇概率很低。
但是由于FMCW的调制方式是连续波,相互间属于同频干扰,上述改变参数方法可以区分大目标与干扰,但无法避免干扰造成的信噪比恶化,造成雷达探测能力降低。
可以考虑的进一步抗干扰方法:
FM+脉冲,并且把脉宽和周期设为上述可变参数之一;
接收和发射均采用宽带模式,加入通信时隙,作为车联网通信辅助手段,用雷达将车辆实时信息交互,用算法匹配规避干扰。
-
24GHZ微波雷达产品开发设计指南2014-07-16 36460
-
24GHz微波雷达FMCW测距系统设计概述2015-12-29 19412
-
24GHZ微波雷达汽车盲区监测(并线辅助)系统解决方案2016-08-23 8320
-
基于24GHz微波雷达技术的汽车盲区监测(BSD)/并线辅助系统电路参考设计2017-05-24 7285
-
Ameya360 汽车雷达系统解决方案2018-04-19 4765
-
24G微波雷达在不同行业的应用案例介绍以及CW/FMCW模式的参考电路资料2018-07-11 5294
-
毫米波汽车雷达测试小结2018-08-04 8104
-
77GHz汽车雷达方案及集成芯片之间有什么区别呢?2019-07-31 3389
-
汽车雷达探头想要发展必须得解决哪些问题?2019-08-09 3513
-
汽车雷达:阵列天线设计步骤2020-06-15 4314
-
5.8G雷达存在感应模块,微波雷达智能感应灯应用,多普勒雷达技术2021-08-21 2312
-
微波雷达感应技术,雷达感应模块智能应用,雷达模组发展2021-09-23 1503
-
汽车雷达不响的原因2022-04-10 35229
-
汽车雷达的使用及干扰规避指南2023-01-09 3895
-
自动驾驶激光雷达之间会相互干扰吗?2025-06-03 1319
全部0条评论

快来发表一下你的评论吧 !
