

机器人控制技术和发展趋势
机器人
描述
机器人的控制系统
机器人的控制系统是指由控制主体(作业指令程序)、控制客体(传感器的反馈信号)和控制媒体(执行机构)组成的具有自身目标和功能的管理系统,该技术的发展及其相关软、硬件技术的进步极大地提升了机器人功能和性能。
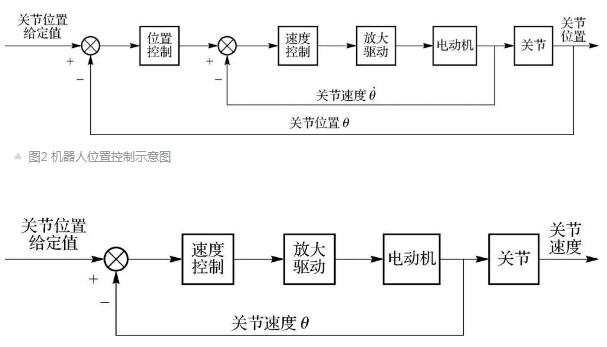
控制系统的主要任务是控制机器人在工作空间中的运动位置、姿态和轨迹、关节力矩、操作顺序及动作的时间等,其基本功能包括示教-再现功能、坐标设置功能、与外围设备的联系功能、位置伺服功能等。
机器人控制技术
机器人控制技术是机器人为完成指定动作和任务所需的控制策略、方法等,主要包括位置控制、力矩控制和智能控制技术三个方面。
位置控制和力矩控制是智能控制技术产生的基础,,其核心包含对速度、加速度、位置和力的控制,并融合了开环系统、PID反馈系统、控制最优系统等经典的控制技术。作为机器人的基础控制技术,位置及力矩控制技术发展至今相对成熟,且逐步趋于完善。
智能控制作为机器人能够自主完成从感知-控制-执行回路的核心,通过运用综合性技术手段,将人工智能(神经网络、贝叶斯网络、专家系统等)与现代控制理论(最优控制、模糊控制、自适应控制等)相结合,发挥各自优势,进而整体提升机器人的智能化程度与任务完成质量。
机器人应用发展趋势
随着人们对生活品质的追求和人力成本的增加,越来越多的机器人走进人们的日常生活之中,在为人们的生活提供最大的便利同时,以私人医生、老师、陪护的身份给人们带来身心的愉悦,目前的典型应用包括家政机器人、陪伴机器人、教育娱乐机器人与医疗康复机器人等。
根据上述应用趋势,未来机器人控制技术的智能化发展方向将主要围绕双向控制技术、语音控制技术、自主控制技术三个方面进行发展。双向控制技术旨在提高机器人控制器的智能化控制能力。语音控制技术可以通过语言交流让机器人完成目标任务,使机器人拥有更大的发展空间。自主控制技术能够让机器人。
自主完成任务实现对机器人的自动化控制,是当前的研究重点和目标。
-
机器人技术八大发展趋势,你知道吗?2014-11-19 2177
-
工业机器人经典好书籍——《工业机器人》2015-02-03 32654
-
中国工业机器人行业发展和未来趋势分析2015-04-25 3040
-
2016年,十大关于人工智能与机器人的发展趋势2016-01-19 3334
-
全球机器人发展现状2016-01-28 4275
-
视觉机器人的发展现状与趋势2016-09-08 5491
-
焊接机器人加装激光焊缝跟踪传感器是焊接自动化的发展趋势2020-03-16 1625
-
工业机器人的发展趋势如何?2020-03-27 3623
-
多轴机器人的发展趋势2020-07-29 7551
-
喷涂机器人的发展趋势2021-03-10 3191
-
工业机器人技术发展趋势2016-09-18 981
-
机器人产业面临的问题及未来发展趋势分析2018-07-02 7313
-
AGV机器人未来发展趋势2019-04-05 2612
-
机器人控制系统的发展趋势2019-11-04 6143
-
机器人技术的发展趋势2024-10-25 3947
全部0条评论

快来发表一下你的评论吧 !
