

移远百科 | GNSS定位技术知多少
卫星通信
描述
提起定位,大家首先想到的就是GNSS(全球卫星导航系统)定位,这是一种被普遍认可、广泛接受的追踪定位技术,可以对人员、动物、资产、车辆等进行追踪定位,并提供有关航向、速度、日期、时间等数据。据GSA数据推测,2020年全球GNSS设备数量将达到80亿部(至少每人一台),这些设备为人们的安全出行、工作和生活带来极大便利。
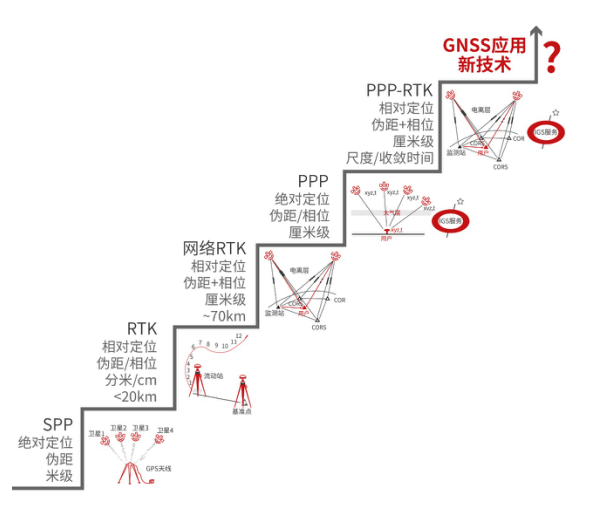
▲GNSS卫星定位技术迭代图
从单系统单频段到多系统多频段
GNSS(Global Navigation Satellite System)并不特指某个单一的卫星系统,而是多个卫星系统的总称。用户设备通过接收卫星提供的经纬度坐标信息来定位。

美国GPS系统是全球第一个卫星导航系统,也是现阶段应用最为广泛、技术最为成熟的卫星定位技术。最初的定位模组只支持GPS系统,属于单系统单频模组。由于单一GPS系统在局部地区、部分时段或信号有遮挡、干扰时会出现可见卫星数过少(《4颗)的情况,导致无法正常定位。随着各国与地区对卫星导航系统的肯定,相继投资建设自己的卫星导航系统,多系统模组随之产生,也被称为多模模组或GNSS模组。
在相同的外界环境基础上,多系统模组能够捕获来自不同卫星系统的卫星,使得有效卫星数大幅度提升,从而提高定位的精度和稳定性。
随着卫星导航系统的发展,最初的GPS L1C/A信号逐渐无法满足用户的定位导航授时需求,美国宣布对GPS现代化,增加了第二民用信号L2C和第三民用信号L5等。GNSS定位模组也开始接收各卫星系统的不同频段信号。
由于定位模组周围环境的影响,使得模组所接收到的卫星信号中还包含有各种反射和折射信号的影响,这就是所谓的多路径效应。多频段技术可以有效抑制城市环境中的多路径效应,削弱大气层误差,提高定位精度。
多种定位技术融合,满足差异化高精度定位需求
GNSS技术能够在几米精度范围内知晓任何物体的绝对位置,毫不夸张的说,它为我们解决了很多难题。现在,从智能网联车、自动驾驶到无人机、机器人,导航应用对自动化需求不断提高,这亟需更高精度的定位解决方案。
GNSS & DR组合定位,实现持续导航
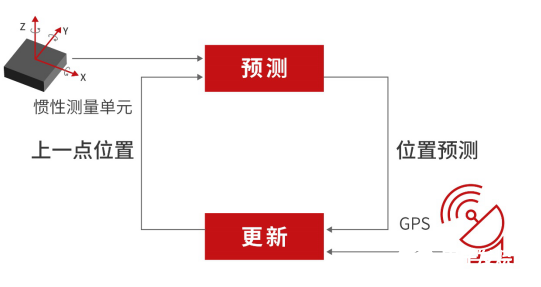
DR (Dead Reckoning),航位推测法,指的是在知道当前时刻位置的条件下,通过测量移动的位置和方位,推算下一时刻位置的方法。通过在设备上加装加速度传感器和陀螺仪传感器,DR算法可以自主确定定位信息,具有短时间内实现局部高精度定位的特点。
GNSS定位在遮挡环境、多路径较严重场景下效果较差,此时结合DR算法,就可以推测出下一秒或多秒内的定位结果。另外,GNSS数据更新频率通常为1Hz,不能满足高动态需求,而IMU(Inertial Measurement Unit,惯性测量单元)更新频率可达100Hz,借助组合,可以显著提高结果频率。但是,DR算法精准度随滤波深度增加而变差,所以需要GNSS对其进行实时纠偏,确保以实际数据不断地更新推测出的位置,达到最好的效果。
主要工作模式如下:
- 上一点估算位置 + IMU数据→预测下一点位置;
- 预测的位置 + GPS定位→更新当前位置;
- 循环。
RTK技术,支持分米/厘米级定位精度
RTK(Real-time kinematic),称为实时动态差分法,又称为载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,包括传统RTK和网络RTK。
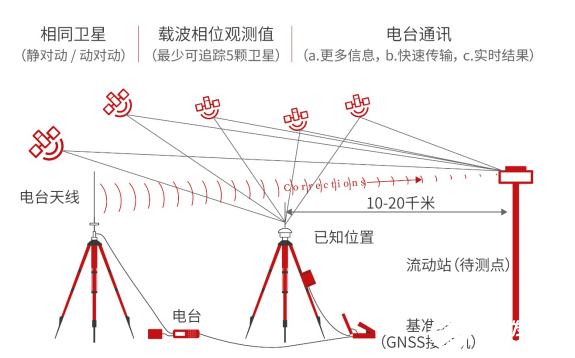
▲传统RTK工作原理
在传统RTK工作模式下,只有一个基准站(GNSS接收机),基准站和流动站之间的距离有限制。基准站将接收到的测量数据与设置基准站的数据进行计算得出差分数据,然后将差分数据通过电台发送给流动站(用户接收机)。流动站也能通过电台接收基准站发送的差分数据,并进行计算,最终得出我们所需要的坐标数据,并提高定位精度。
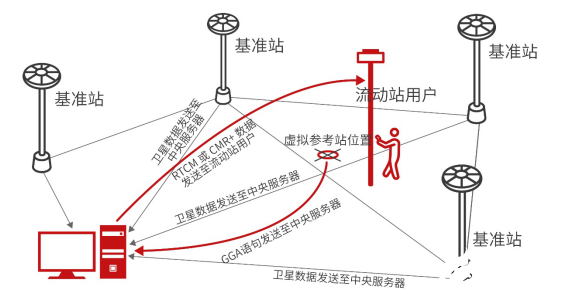
▲网络RTK工作原理
在网络RTK中,有多个基准站,用户不需要建立自己的基准站,用户与基准站的距离可以扩展到上百公里,网络RTK减少了误差源,尤其是与距离相关的误差。
首先,多个基准站同时采集观测数据并将数据传送到数据处理中心,数据处理中心有1台主控电脑能够通过网络控制所有的基准站。所有从基准站传来的数据先经过粗差剔除,然后主控电脑对这些数据进行联网解算。最后,播发改正信息给用户。
网络RTK至少要有3个基准站才能计算出改正信息。改正信息的可靠性和精度会随基准站数目的增加而得到改善。当存在足够多的基准站时,如果某个基准站出现故障,系统仍然可以正常运行并且提供可靠的改正信息。
相比传统RTK,网络RTK对误差估算得更加准确,通过VRS (Virtual Reference Station)虚拟参考站技术进一步增强基准站和流动站误差的相关性。总的来说,网络RTK的精度和稳定性,要高于传统RTK。
GNSS市场稳步增长
据GSA数据统计,未来十年,全球GNSS设备出货量将持续增长。从2019年的18亿台增长至2029年的28亿台。其中,在道路运输与汽车、无人机、人员与资产追踪、智能电网等领域的应用将呈现爆发式增长。如何在可接受的成本内选择合适的GNSS技术,将成为摆在终端制造商面前的难题。
移远GNSS模组种类齐全 可满足不同领域定制化需求
作为全球领先的蜂窝模组和GNSS模组供应商,移远通信多模单频L76/L26系列和多模多频LC79D已在工业类、消费类等大众化定位应用领域获得丰富量产经验及良好口碑。
在多种技术融合定位方面,移远通信更是走在行业前列。其惯性导航领域,LC79D升级版和L26-DR系列均支持GNSS+DR组合定位且已实现量产;其高精度领域,工规级内置RTK+DR技术定位模组LC29D成为共享单车类产品的挚爱,车规级内置RTK+DR技术定位模组LG69T更是在为大型整车厂及Tier 1客户提供厘米级定位、追踪和导航服务。
-
移远GNSS天线新品重磅来袭!一站式方案,赋能精准定位2025-10-13 961
-
百度百科启动“繁星计划”2024-12-31 1511
-
移远通信推出“全系统+全频段”高精度GNSS定位模组LG290P2024-05-14 2108
-
移远通信全新高精度GNSS定位模组LC29H正式面世2022-06-22 2961
-
移远GNSS模组在GNSS卫星定位技术中的应用2022-04-21 3911
-
移远通信开发GNSS定位模组产品线,完善物联网解决方案2020-07-28 1697
-
请问有没有使用过移远GNSS模块L86的同学?室内定位效果怎么样?2018-02-23 6233
-
维基百科怎么上?Wikipedia打不开怎么办?2016-12-08 24423
-
数据库-百度百科2016-05-04 1054
-
石墨的百科知识大全2009-10-26 5627
-
维基和百科网站在中国的微妙局势2009-10-21 1184
-
电子电路百科全书下载2009-09-25 222682
-
电子电路百科全书2006-03-14 4927
全部0条评论

快来发表一下你的评论吧 !
