

解耦时所需的步骤以及注意事项
电子说
描述
解耦时必须注意以下事项:
设备输出端设置保持不变还是改变,取决于用哪个 IOCTL 功能给设备解耦。
IOCTL(”PNIO-CTRL”,60, [ 用户 ID]):设备输出端设置保持不变。如果将设备短时间断开电源后又重新接上,则会恢复输出端设置。
IOCTL(“PNIO-CTRL”,1060, [ 用户 ID] ):设备输出端设置不会保持不变,而是在解耦后立即归零。如果将设备短时间断开电源后又重新接上,则不会恢复输出端设置。
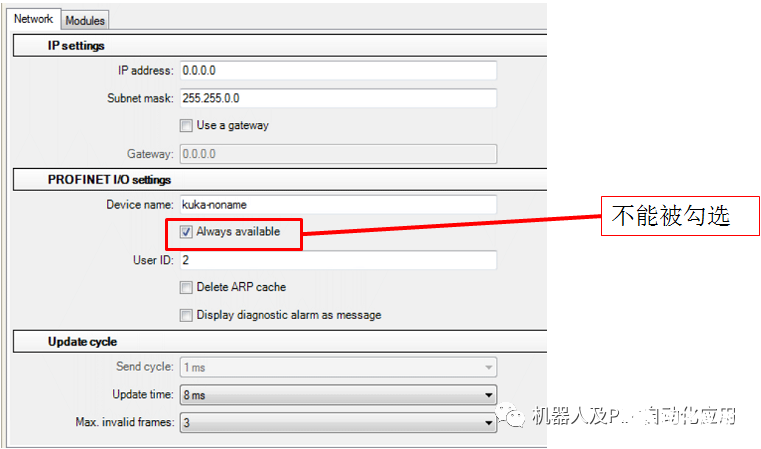
始终可用网络
勾选:机器人控制器启动时期待设备已被激活。若设备未被激活,将输出故障信息。
未勾选:机器人控制系统在启动时不检查设备是否已被激活。
解耦:
1. 在一台机器人上使用该设备时:
RET =IOCTL(”PNIO-CTRL”,60, [ 用户 ID] )
2.在一台或多台机器人上使用该设备时:
RET =IOCTL(“PNIO-CTRL”,1060, [ 用户 ID] )
耦合:
1. 在一台机器人上使用该设备时:
RET =IOCTL(”PNIO-CTRL”,50, [ 用户 ID] )
2. 在一台或多台机器人上使用该设备时:
RET =IOCTL(”PNIO-CTRL”,1050, [ 用户 ID] )
RET 的返还值:
0 IOCTL 已成功执行。
1 超时
2 IOCTL 包含一个错误参数。
------------------------------------------------
解耦的操作步骤:
1. 选择菜单序列显示 》 变量 》 单个。
2. 在名称栏输入:
在一台机器人上使用该设备时:
=IOCTL(“PNIO-CTRL”,60,[ 用户识别号 ])
在一台或多台机器人上使用该设备时:
=IOCTL(“PNIO-CTRL”,1060,[ 用户识别号 ])
3. 用回车键确认。设备即被解耦。
耦合的操作步骤:
1. 选择菜单序列显示 》 变量 》 单个。
2. 在名称栏输入:
在一台机器人上使用该设备时:
=IOCTL(“PNIO-CTRL”,50,[ 用户识别号 ])
在一台或多台机器人上使用该设备时:
=IOCTL(“PNIO-CTRL”,1050,[ 用户识别号 ])
3. 用回车键确认。设备即被耦合。
责任编辑:dhj
-
如何为住宅配置静态IP:步骤与注意事项2024-10-24 2671
-
profinet网关的接线步骤和注意事项2024-09-18 3679
-
光耦在实际使用中的注意事项2024-08-15 3147
-
使用示波器探头的步骤、技巧和注意事项2024-01-17 6537
-
选择微控制器的几个步骤和注意事项2023-08-16 1662
-
安全光幕选型方法以及注意事项2023-06-28 1850
-
STM32外部中断EXIT使用步骤是什么?有哪些注意事项?2021-11-17 1444
-
自动酶标仪的使用步骤及注意事项2021-08-27 11446
-
全自动端子机操作步骤_注意事项及保养2018-06-05 1649
-
钽电容使用注意事项2017-09-19 1835
-
PowerPCB到Allegro的转换步骤与注意事项2016-02-15 932
-
TCL各机芯软件升级操作步骤及注意事项2013-09-06 885
-
IGBT驱动光耦TLP250的应用及注意事项2012-07-18 59714
-
可控硅光耦的使用注意事项2009-07-27 4498
全部0条评论

快来发表一下你的评论吧 !
