

机器人原始程序布局状态与改进后的布局状态
电子说
1.4w人已加入
描述
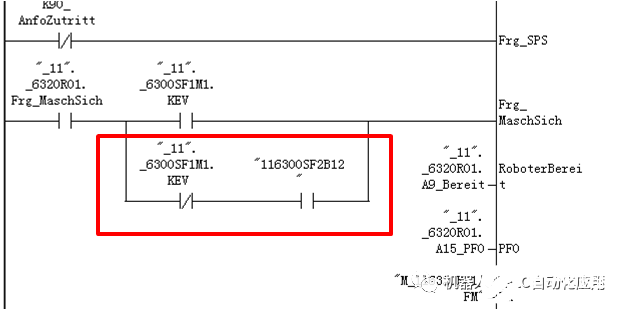
原始程序布局状态
改进后的布局状态:
升降门开的时候,对射光电不能被触碰否则机器人2将立即停止。
1.将机器人E14机器人安全加入光电及升降门信号。
2.机器人安全门回路加入光电和升降门信号。
3.误闯光电会引起工作组1报安全门故障。
1.将机器人E14机器人安全加入光电及升降门信号。
编程速度快,改动最小,影响范围小,安全系数低。
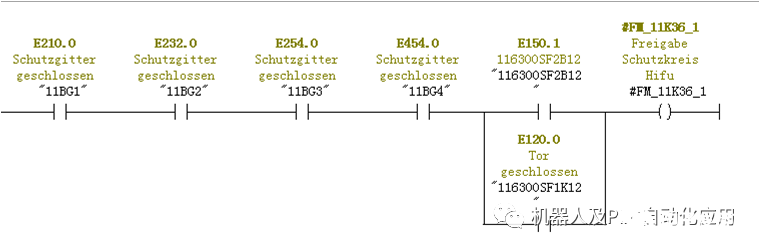
2.机器人安全门回路加入光电和升降门信号。
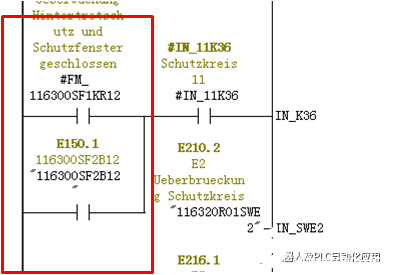
打开升降门后,如果挡光电会引起机器人2号的安全门回路断开,使机器人以安全停止1的方式停止。
相对1的解决方案,这个方案的安全系数更高,完全控制了2 号机器人,但当人员跨过新加光栅后,3号/4号机器人仍然在运动,还是有一定的安全风险。
3.误闯光电会引起工作组1报安全门故障。
并入安全门控制回路,如果开着升降门直接闯过光栅,将使整个工作组1停止产生安全门开故障。
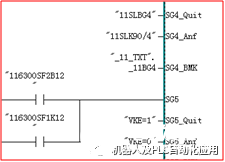
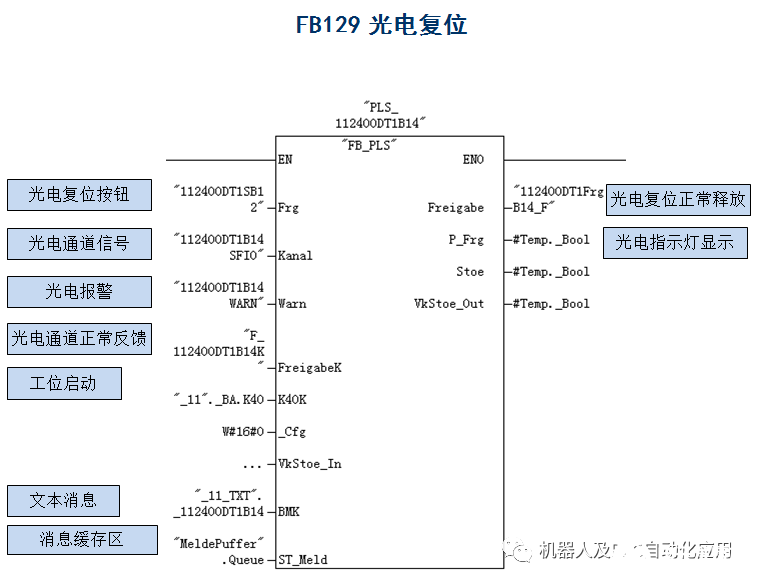
光电复位示意图:
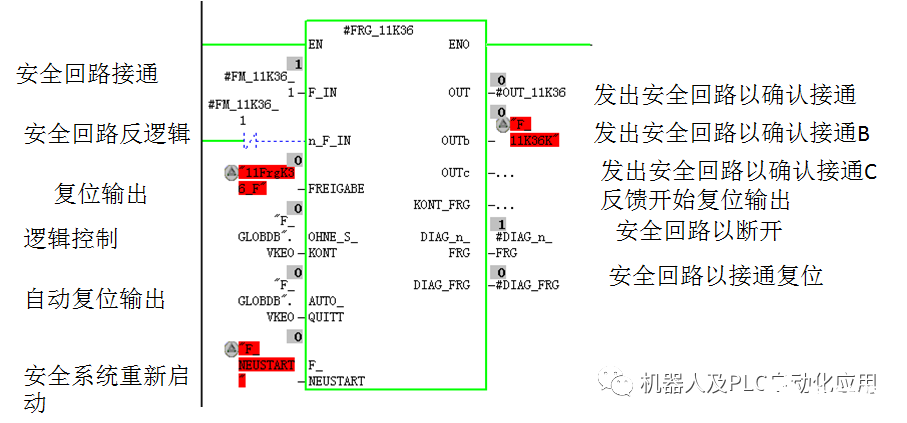
FB950接口设置
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
工业机器人的末端关节旋转该精确控制?2018-11-01 4275
-
智能巡航并将机器人怎么实现状态显示输出?2020-03-17 2264
-
【大联大品佳 NXP i.MX RT1050试用申请】智能检测人体状态机器人2020-08-10 1229
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12128
-
每日推荐 | 乒乓球机器人项目分享,PCB布局布线技巧2022-07-13 12548
-
PDF——工业机器人技术及应用2022-10-16 27315
-
Facebook布局机器人研究 突破AI研究极限2018-07-25 3521
-
LG电子公开可支持人体下肢肌肉力量的可穿戴机器人,助力布局机器人领域2018-09-12 1170
-
智能机器人重点针对人体不同部位的手术机器人做了全面布局2020-06-19 2371
-
机器人刚体运动状态描述详细课件2020-07-20 927
-
读取机器人程序中的变量2023-05-29 1752
-
四足机器人步态规划与接触状态2023-11-16 1570
-
工业机器人abb左边布局没了怎么办2024-06-17 5556
-
机器人语言系统包括三个基本状态2024-09-04 1547
-
海康机器人布局关节机器人业务2025-03-20 1268
全部0条评论

快来发表一下你的评论吧 !
