

8.3系统中MAKRO57的最新用法分析
描述
例如: 下面是电伺服焊钳中的用法.
Makro57(ADV :IN)
--重置变量--
TECH2 AlleKonfigurationen=zuruecksetzen Techaufruf=EIN
VW_USR_R(#USR_MAKRO,201,2100,1,1,1,1,1,1,1,1,TRUE)
–暂时没用--
TECH1 RZ Steuerung=Nr1 stationaerTechaufruf=EIN
VW_USR_R(#USR_MAKRO,107,1,2,1,1,1,1,1,1,1,TRUE)
水流量控
TECH4 Roboter-RIP RIP=Nr1Kuehlwasser-Sensor=Ausw.KW min/max Ventil=Bistabil Kontrolle Niederdruck=EINTechaufruf=EIN
VW_USR_R(#USR_MAKRO,407,4701,2,2,2,2,1,1,1,1,TRUE)
转手阀岛上使用几个控制阀
TECH4 Ventilinsel Hersteller=Rueckm.Steuerluft vorh. Greifer-Ventilinsel Nr1=vorhanden Greifer-VentilinselNr2=nicht vorhanden Greifer-Ventilinsel Nr3=nicht vorhanden Saugkreise=nichtvorhanden ND-Abfrage an Greifer-Ventilinsel=Nr1 nicht vorhanden Slave-Startadresse=vordefiniertTechaufruf=EIN
VW_USR_R(#USR_MAKRO,404,4402,2,1,1,0,1,1,1,0,TRUE)
-- --
KF铣刀
TECH2 KF Steuerung=Nr1Ausfuehrung=Wechsler(Sintherleghe) Normalfraesen mit 1Hub KF Ausblasen beiZange schliessen ohne Versetzeinheit Slave-Startadresse(nurWechsler)=vordefiniert Techaufruf=EIN
VW_USR_R(#USR_MAKRO,204,2401,5,1,1,0,1,0,1,0,TRUE)
–是否使用自动电极帽更换器--
F537 = AUS
F534 = AUS
– 是否使用“ Sinterlegh“牌的电极帽更换器--
F808 = AUS
F564 = EIN 使用铣刀1 F_KF_mit_VE[1]=564
F321 = EIN 在原位控制A23的安全门允许进入
------------------------------------------------
-------------------------------------------------
TECH2 AlleKonfigurationen=zuruecksetzen Techaufruf=EIN
VW_USR_R(#USR_MAKRO,201,2100,1,1,1,1,1,1,1,1,TRUE)
--重置变量--
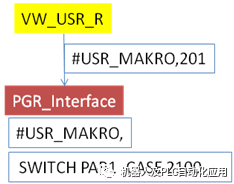
SWITCH PAR1 ---初始化变量
-
Matlab中的冒号的用法2009-03-11 0
-
verilogHDL中的{}用法2015-03-22 0
-
PROTEUS 8.3 汉化软件,正在开发中2015-09-16 0
-
请问大家帮忙分析下图电路中运放的用法2019-02-12 0
-
无线数字传感器的新用法2010-04-21 675
-
OrCAD中创建总线及用法详解2011-12-02 26182
-
UC3842控制芯片在反激电源上的新用法2012-03-16 1250
-
Proteus 8.3中文语言包2015-11-20 4668
-
坚果pro和oppoa57哪个好?坚果pro和oppoa57的深度评测分析2017-12-15 2515
-
KUKA 8.3系统中MAKRO40 POT空运转的用法2021-03-10 1470
-
Simulink中的Battery模块用法概述2023-06-28 6316
-
Stream模块的基础用法和进阶用法2023-09-19 1223
-
Pipeline中throwIt的用法2023-10-21 580
-
oracle中substr函数用法2023-12-05 1372
-
split在python中的用法2023-12-25 2047
全部0条评论

快来发表一下你的评论吧 !
