

KUKAC2老机器人调试工作,帮助客户解决了摆臂.
描述
近日参加了C2老机器人的调试工作,帮助客户解决了摆臂的停摆问题.
PTP VB=100% VE=0% ACC=100% Wzg=1 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: A852 = AUS
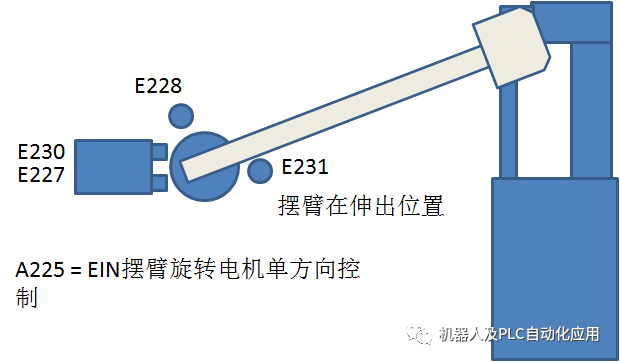
3: A225 = EIN摆臂电机转动
4: WARTE BIS E231 & !E227摆臂电机转动到伸出位置
5: A225 = AUS
6: bin2 ( EIN ) = 128
7: USER_S9_Teil_1_SZ Nr1 P-Nr=131 - - SST_P-Nr=131 - EIN
9: F56 = EIN
10: F57 = AUS
11: F58 = AUS
12: F59 = AUS
13: SPSMAKRO67 = F62 + F63 铣削
14: WARTE BIS E125 & !E126 & E127 焊钳打开到位
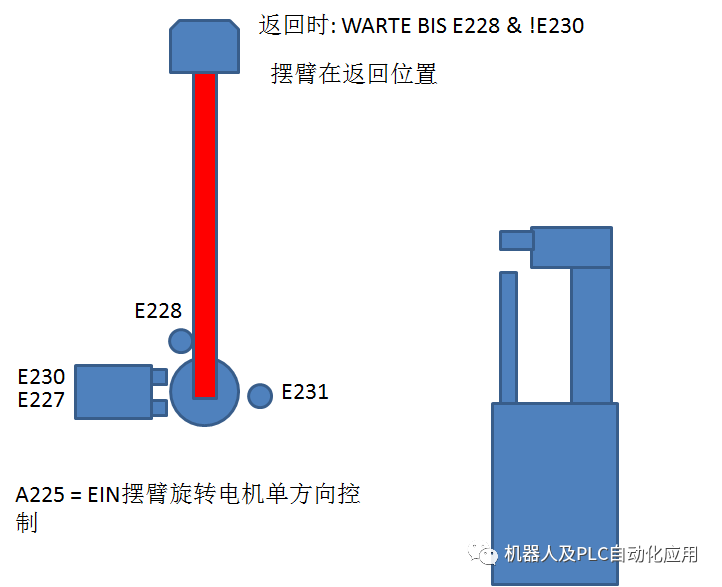
15: A225 = EIN 摆臂电机转动
16: WARTE BIS E228 & !E230 摆臂电机转动到返回位置
在进行手动操作摆臂的位置不能正确调整和优化.
摆臂控制由于IO控制的改变不能实现电机转动时实现自动到位停止功能.
在VW_USR_S 程序INIT里控制终断程序
GLOBAL INTERRUPT DECL 2 WHEN $IN[E231] ==TRUE DO KS_Abschalten()
INTERRUPT ON 2
GLOBAL INTERRUPTDECL 3 WHEN $IN[E228] == TRUE DO KS_Abschalten()
INTERRUPT ON 3
KS1_Arbeit:235=>E231 伸出到位 WARTEBIS E231 & !E227翻转到伸出位
KS1_Ruhe:234 => E228 返回到位 WARTE BIS E228 & !E230 翻转到返回位
KS_Abschalten()关闭摆臂铣刀程序
GLOBAL DEF KS_Abschalten() 将A234改为A225 实现了控制摆臂旋转电机功能
IF ( $OUT[225] OR $OUT[235] OR $OUT[362] OR $OUT[363] OR $OUT[2011] OR$OUT[2012] OR $OUT[2021] OR $OUT[2022]) THEN
$OUT[234] = FALSE A225 = EIN翻转电机启动
$OUT[235] =FALSE
$OUT[362] =FALSE
$OUT[363] =FALSE
$OUT[2011] =FALSE
$OUT[2012] =FALSE
$OUT[2021] =FALSE
$OUT[2022] =FALSE
ENDIF
-
【mBot申请】物流搬运机器人2015-11-30 5280
-
智久AGV搬运机器人呼唤更多中国籍的机器人2015-12-17 5179
-
可视化机器人2016-07-31 4246
-
工业机器人的工作原理2017-12-15 4617
-
如何保障桁架机器人的安全2018-09-29 3052
-
用Arduino调试Rapiro机器人2019-08-10 5382
-
机器人是什么?2022-03-31 22110
-
新松研发的并联机器人摆肠机系统进行出厂调试2018-11-30 3833
-
机器人臂展选择三大注意事项2019-03-29 2168
-
关于机器人臂展相关知识的深度解读2020-03-28 4493
-
KUKAC2机器人程序备份如何操作2020-12-23 9850
-
焊接机器人调试技巧2021-11-04 9771
-
KRC机器人在过程数据通信方面扮演各种角色2022-08-01 1208
-
介绍一下KUKAC2机器人关于INTERBUS PCI卡进行主从配置的文件2023-02-20 3934
-
焊接机器人调试技巧有哪些2024-06-27 1628
全部0条评论

快来发表一下你的评论吧 !
