

传感器测量怎么做才能稳定呢?
电子说
描述
今天遇到一个网友问一个问题,他有一个传感器测量一个物理量,需要判断其变化趋势,我给了一些建议,这里将这个建议展开做些深入分析,并分享给大家。
本文想借此表达一下个人的一个观点,做开发如果遇到无法解决的难题,可以试着从数学的角度出发,看能否找到答案。
是个啥坑?一个项目中用到一个传感器测量一物理量,这里假定测量温度吧。需要判断其变化趋势,利用这个变化趋势去做一些应用。
那么要怎么判断一个物理量的变化趋势呢?我们能自然能想到去求取该随机序列的变化率。这里涉及到一些数序定义。随机序列有很多可能的来源,最为常见是模数采样。
这样将S(t)信号转换为离散信号序列S(n),那么对于当前时刻其斜率怎么求取呢?(这里忽略中间的过度态,仅将其看为线段相连,当然现实应用中如果有更高要求,可以做曲线拟合)
但是如果只判断,斜率极容易误判,比如下面这样的情况:
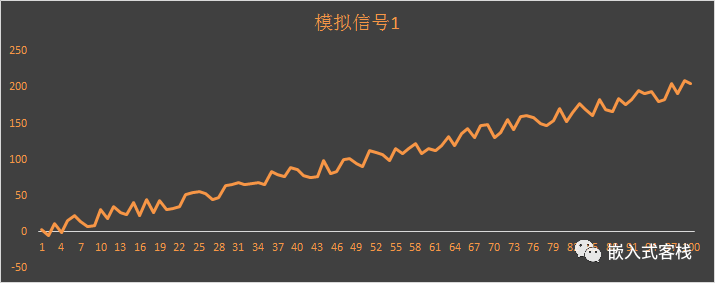
其斜率一会儿正,一会儿负,但是其总体趋势又是在增加的,所以只考察斜率显然不可取,获取需要在代码在加各种复杂的条件或者限值去判断。即使加这么多条件系统仍然可能表现的非常不健壮。
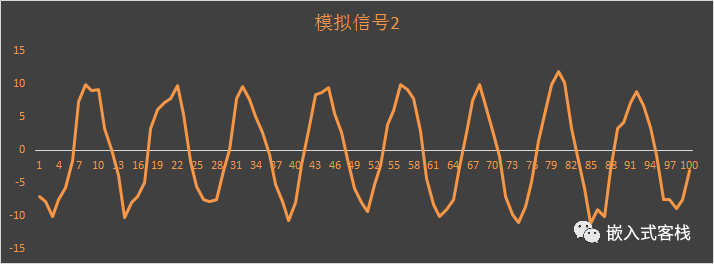
对于模拟信号2而言,趋势又在不断变化。那么怎么做才能稳定呢?先卖个关子?
函数的凹凸性凹函数凹函数是一个定义在某个向量空间的凸集C(区间)上的实值函数f。设f为定义在区间I上的函数,若对I上的任意两点x1《x2和任意的实数t属于(0,1),总有,
则称函数f为l上凹函数,有的书上也称为下凸函数。
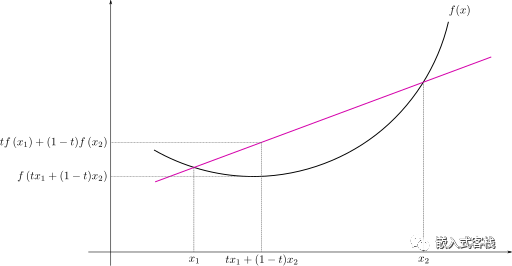
如果把上述条件中的“≥”改成“》”,则叫做严格上凹函数,或叫做严格下凸函数。
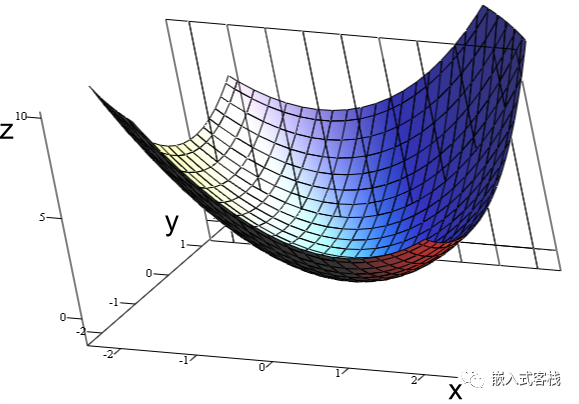
上面是一维函数情况,这里来个2维函数的图,刚方便理解
凸函数设f为定义在区间I上的函数,若对I上的任意两点x1《x2和任意的实数t属于(0,1),上面不等式变成大于等于,则在该区间为凸函数。
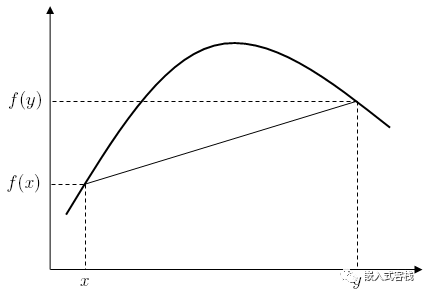
可见,凹凸是相对的,如f(x)在某区间为凹,则-f(x)则在该区间为凸。
性质若一个函数在某区间二阶可导且大于0,则函数在该区间为凹函数
若一个函数在某区间二阶可导且小于0,则函数在该区间为凸函数
证明,这里就不推导了,可以利用拉格朗日中值定理可以推导出上面这个性质。
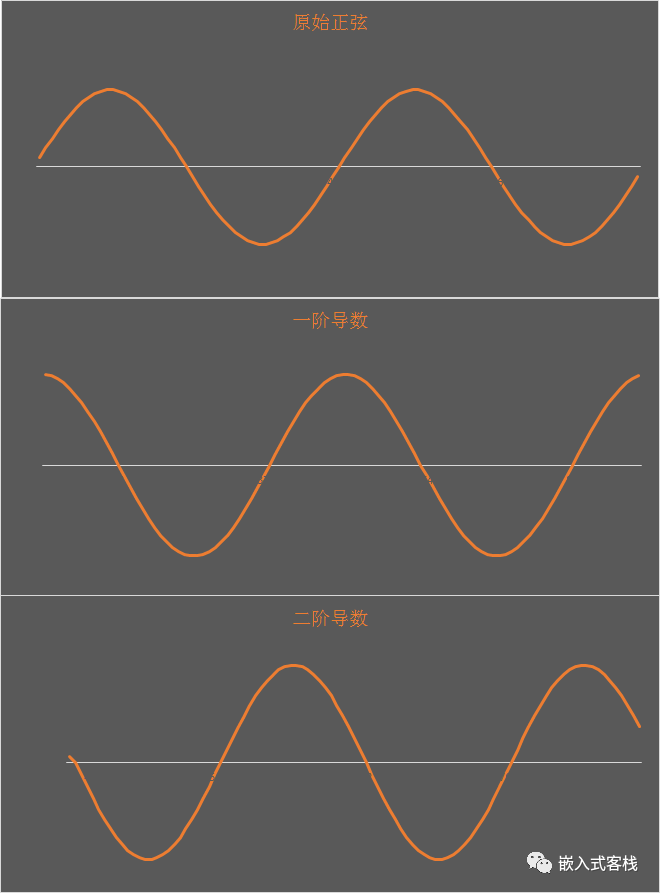
来看一下会动的图,加深一下理解:
函数从到切线为蓝色,曲线向上凹,绿色表示曲线是向下凹的,红色表示曲线的拐点。
sin(2x)的一阶导数为:
sin(2x)的二阶导数为:
回到坑里通过上面装逼,是否可以利用离散序列的求导数来判断传感器的变化趋势。啥?导数?又要开始表演了?
前面说了一阶导数是这样的:
那么二阶导数是哪样捏?
化简一下:
其中S[n]表示当前测量点,S[n-1]表示前一个测量点,S[n-2]表示前第2个测量点。应为+S[n-2]
上代码#include 《stdio.h》
#include 《math.h》
#include 《string.h》
typedef struct _T_2ND_DRV
float xn1;
float xn2;
}t_2ND_DRV;
typedef struct _T_1ST_DRV
float xn1;
}t_1ST_DRV;
void init_second_derivative(t_2ND_DRV *pSndDrv)
pSndDrv-》xn1 = 0;
pSndDrv-》xn2 = 0;
float second_derivative(t_2ND_DRV *pSndDrv, float xn,float T)
float result=0.0f;
if(T《=0)
return 0x7FBFFFFF; /*非法数据*/
result = (xn-2*pSndDrv-》xn1+pSndDrv-》xn2)/T/T;
pSndDrv-》xn2 = pSndDrv-》xn1;
pSndDrv-》xn1 = xn;
return result;
void init_fisrt_derivative(t_1ST_DRV *p1stDrv)
p1stDrv-》xn1 = 0;
float fisrt_derivative(t_1ST_DRV *p1stDrv, float xn,float T)
float result=0.0f;
if(T《=0)
return 0x7FBFFFFF; /*非法数据*/
result = (xn-p1stDrv-》xn1)/T;
p1stDrv-》xn1 = xn;
return result;
#define PI 3.1415f
#define SAMPLE_RATE 500.0f
#define SAMPLE_T (1/SAMPLE_RATE)
#define SAMPLE_SIZE (100)
int main()
float sim1[SAMPLE_SIZE];
float sim2[SAMPLE_SIZE];
float out1[SAMPLE_SIZE];
float out2[SAMPLE_SIZE];
t_2ND_DRV sndDrv;
t_1ST_DRV frtDrv;
init_fisrt_derivative(&frtDrv);
init_second_derivative(&sndDrv);
FILE *pFile=fopen(“。/simulationSin.csv”,“wt+”);
if(pFile==NULL)
printf(“simulationSin.csv opened failed”);
return -1
for(int i=0;i《SAMPLE_SIZE;i++)
sim1[i]=10*sin(2*PI*10*i/500);
for(int i=0;i《SAMPLE_SIZE;i++)
out1[i]=fisrt_derivative(&frtDrv,sim1[i],SAMPLE_T);
out2[i]=second_derivative(&sndDrv,sim1[i],SAMPLE_T);
fprintf(pFile,“%f,%f,%f
sim1[i],out1[i],out2[i])
fclose(pFile);
return 0;
忽略前两个点,利用excel生成曲线:
从图中可看出:
一阶导数为正时,函数递增趋势;
一阶导数为负时,函数递减趋势;
二阶导数为0时,出现拐点,趋势改变;此时如果左右两侧的一阶导符号相反,则出现极值。
二阶导数为负时,其一阶导数也即原函数斜率规律单调减,二阶导数为正时,其一阶导数也即原函数斜率规律单调增。
再进一步:
一阶导数与二阶导数结合起来看,就可以看出测量值变化趋势的趋势,比如在前1/4周期,此区间变换趋势为增,也即一阶导数为正,而其二阶导数为负,也可以看出递增的趋势是逐渐减小到0的。
代码优化如果只是做定性判断,上述函数,完全没必要与采样周期做除法,只需要考察其增量即可,代码可优化如下:
typedef struct _T_2ND_DRV
float xn1;
float xn2;
}t_2ND_DRV;
typedef struct _T_1ST_DRV
float xn1;
}t_1ST_DRV;
void init_second_derivative(t_2ND_DRV *pSndDrv)
pSndDrv-》xn1 = 0;
pSndDrv-》xn2 = 0;
float second_derivative(t_2ND_DRV *pSndDrv, float xn)
float result=0.0f;
result = xn-2*pSndDrv-》xn1+pSndDrv-》xn2;
pSndDrv-》xn2 = pSndDrv-》xn1;
pSndDrv-》xn1 = xn;
return result;
void init_fisrt_derivative(t_1ST_DRV *p1stDrv)
p1stDrv-》xn1 = 0;
float fisrt_derivative(t_1ST_DRV *p1stDrv, float xn)
float result=0.0f;
result = xn-p1stDrv-》xn1;
p1stDrv-》xn1 = xn;
return result;
意外收获这里意外引入一个可能很多人没注意的知识点NaN,在计算中,NaN代表非数字,是数字数据类型的成员,可以将其解释为不确定的或无法表示的值,尤其是在浮点运算中。1985年,IEEE 754浮点标准引入了NaN的系统使用,并表示了其他无限量(如无穷大)。
前述函数返回0x7FBFFFFF,也就是表示无穷大。
不同的操作系统和编程语言可能具有NaN的不同字符串表示形式:
nan
NaN
NaN%
NAN
NaNQ
NaNS
qNaN
sNaN
1.#SNAN
1.#QNAN
-1.#IND
实际上,由于编码的NaN具有符号,因此通常也可以在NaN的字符串表示中找到它们,例如:
-NaN
NaN12345
-sNaN12300
-NaN(s1234)
工程应用这里给出我的建议方案:
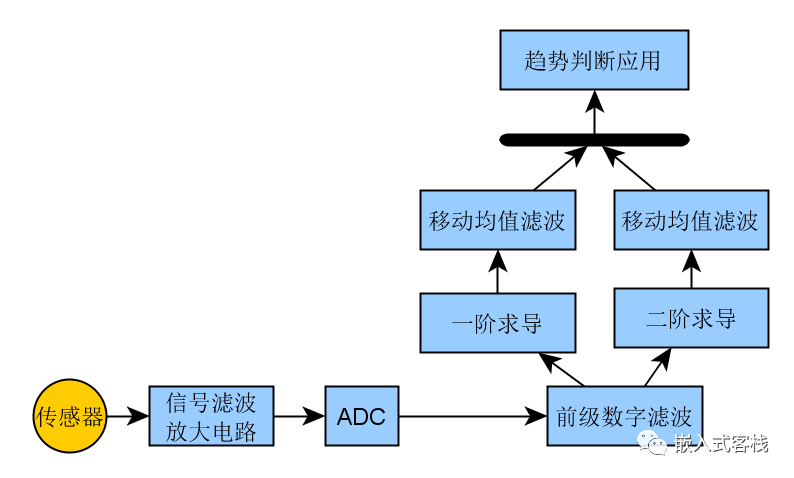
将传感器信号经由电路处理,模数采样,在进入前级数字滤波器,滤除不必要的噪声,在进行一阶/二阶求导。对于一阶和二阶求导再做一级移动平均滤波,最后在按照上面描述进行判别变化趋势,则个人认为基本就比较健壮了。实际移动均值滤波长度不宜选择过长,否则响应就比较滞后了。不能对传感器的变化趋势做出实时的判别。加了后级均值滤波器,则会消除由于波形忽上忽下的随机噪声干扰影响,使得系统判别更为健壮,实际滤波器长度需根据不同的场合进行调试优化。或者也可以选择别的IIR/FIR滤波器形式实现。
总结一下做为嵌入式er编程,有时候有必要去看看数学书,了解一下数学原理的背后故事,可能会给你带来意想不到的作用哦。
责任编辑:pj
-
想用labview做三维动画仿真加速度传感器数据该怎么做?求...2013-07-07 0
-
基于Labview求传感器灵敏度。线性度,迟滞误差怎么做?2014-05-11 0
-
如何做传感器前放的设计2015-06-18 0
-
传感器测量方法比较2018-11-07 0
-
使用scons编译时,需要怎么做才能输出gcc的完整编译信息呢?2022-04-02 0
-
使用scons编译时,我需要怎么做才能输出gcc的完整编译信息呢?2023-03-23 0
-
土壤湿度传感器始终显示1023值是为什么?2023-05-12 0
-
51单片机里的烟雾传感器功能设计怎么做?2023-11-07 0
-
传感器测量原理2009-11-14 827
-
张力传感器的测量原理2008-01-07 3329
-
怎么做CANopen开发2017-09-27 1321
-
温度传感器要怎样才能与PLC相连?2020-09-10 11280
-
看报表时要怎么做才能主动地按需分析2021-10-09 329
-
冷油器管板渗漏修补怎么做2022-01-11 601
-
传感器如何做UL认证2023-08-17 1012
全部0条评论

快来发表一下你的评论吧 !
