

机器人控制系统重新初始化以及电极帽磨损量
描述
使用插件SERVOGUNBASIC插件
使用的直接与插件进行通讯的函数:
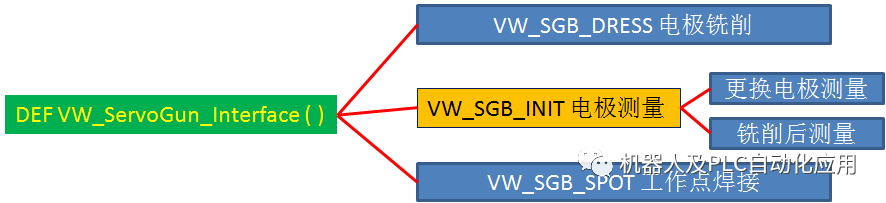
SPOT 工作点(焊点)
INIT 测量损耗值
TipDRESS 铣电极
以上函数以自动定义为系统函数!直接使用,以后会详解。
功能简述:
TipDRESS 铣电极
必须在焊接计时器中设定以下参数:
1.修磨时间 (总循环时间)
2.无焊接电流的循环
必须在无焊接电流的情况下执行修磨。如果带电进行修磨,则会导致设备受损。
修磨时的运行符合焊接运行情况。焊钳闭合,直到达到设定的作力。然后机器人控制系统设定输出端 焊接开始 并等待输入端 焊接结束。
INIT 测量损耗值
首次更换电极-初始化时将出现下列情况:
1.卡钳以恒定速度闭合,直至达到首次初始化作用力。电极头将被牢固地按到电极上。
2. 卡钳打开。
3. 用初始化作用力闭合焊钳。
4. 机器人控制系统重新初始化电极帽磨损量。
周期性铣削后测量-初始化时将发生下列情况:
1.用初始化作用力闭合焊钳。
2.机器人控制系统将当前电极帽烧损量保存至 SG_WEAR[]。如果当前磨损量大于最大允许磨损 SG_WEAR_MAX,则将发出一条信息并设定输出端 需要新焊钳电极。然后必须更换电极头。
整个过程不使用通过INIT给插件直接进行测量。
SPOT 工作点(焊点)
可移动的电极 至少距离工件 30 mm
固定电极 距离工件 0 mm,固定电极应位于工件处,但不要施加作用力。
焊钳开口必须至少离负向软件开关 4 mm(钳口闭合步的小于下限 )。
整个过焊接过程通过USER程序的调用,通过KUKA里安装的插件直接进行焊接,并通过 VW_SK_USR_S( )程序对焊接结果进行监控.
责任编辑:pj
-
LabVIEW的六轴工业机器人运动控制系统2023-12-21 0
-
如何系统性地学习工业机器人技术?2016-03-06 0
-
如何利用ARM研究嵌入式服务机器人控制器?2019-07-30 0
-
嵌入式服务机器人控制系统能实现什么功能?2019-10-15 0
-
嵌入式机器人控制系统设计的组织架构是怎么样的?2020-03-06 0
-
基于CAN总线和双传感器仿人机器人运动控制系统的研究2020-08-19 0
-
有关机器人控制系统的基本知识都总结好了2021-06-30 0
-
关于机器人控制系统的这几方面知识你必须掌握2021-07-05 0
-
机器人系统与控制需求简介2021-09-08 0
-
机器人的控制系统2021-09-13 0
-
什么是机器人控制系统2021-10-11 0
-
如何使用树莓派开发智能机器人控制系统2021-12-23 0
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 0
-
机器人控制系统概念!机器人控制系统的基本要求2018-12-17 9889
-
机器人控制系统分类_机器人控制系统有哪些2019-11-04 26785
全部0条评论

快来发表一下你的评论吧 !
