

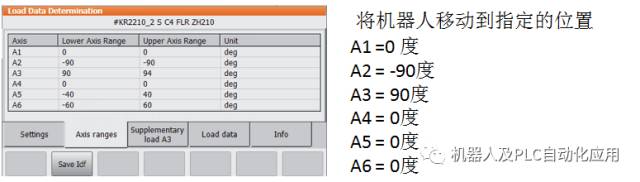
KUKA机器人工具负载学习
描述
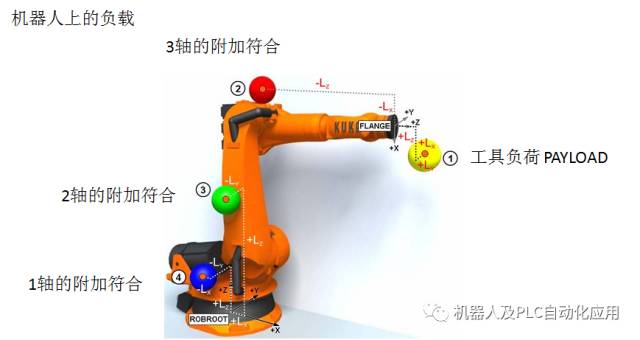

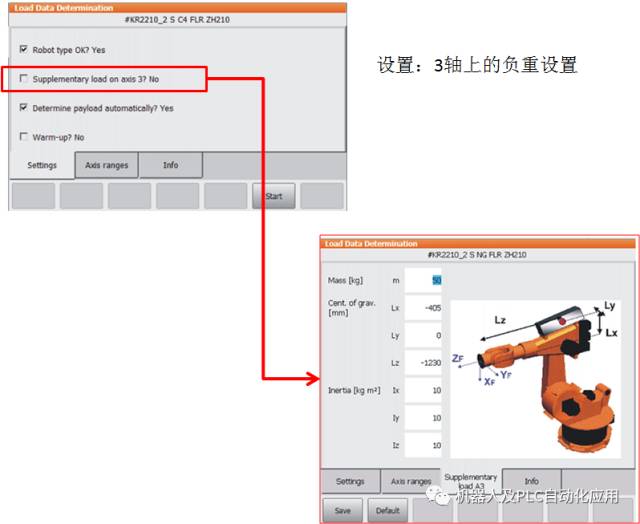
附加负载数据必须输入机器人控制系统。必要的数据包括:
n 质量 (m),单位:kg
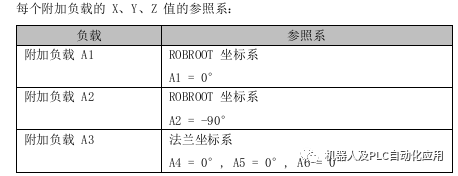
n 物体重心至参照系 (X、Y 和 Z)的距离,单位:mm
n 主惯性轴与参照系 (A、B 和 C) 的夹角,单位:度(°)
n 物体绕惯性轴 (Jx、Jy 和 Jz) 的转动惯量,单位:kgm²
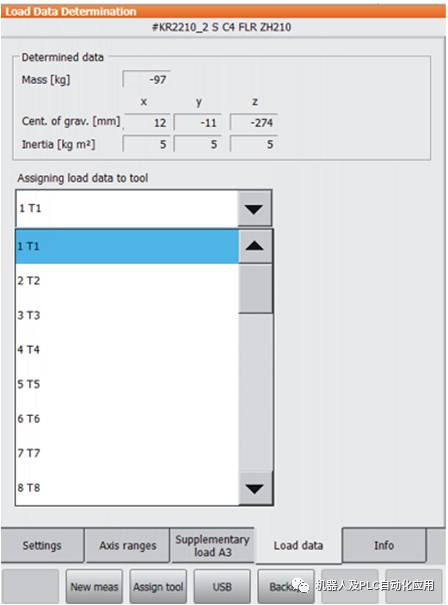
测量之后选择要被测量负荷的工具
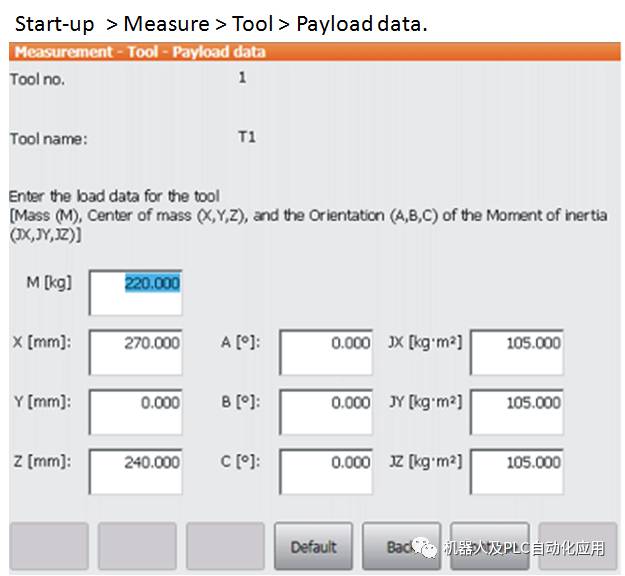
查看工具的负荷
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
abb机器人工具坐标系问题2024-08-07 14427
-
KUKA重型机器人2015-02-03 8138
-
华南机器人应用培训中心工业机器人培训班招生2015-09-02 14271
-
求KUKA机器人控制柜三维模型2016-04-18 6340
-
Matlab使用机器人工具箱问题2017-11-20 20532
-
KUKA机器人问题解答2019-07-15 2532
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10800
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 7886
-
库卡机器人MGV电源模块维修2021-09-08 1725
-
机器人工具箱中的常用函数介绍2021-09-15 1983
-
KUKA机器人伺服驱动模块维修2021-09-17 1750
-
机器人工程师学习计划2021-12-20 3050
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3777
-
KUKA机器人TCP(工具中心点)设定2015-12-23 2115
-
KUKA机器人应用及系统概述2017-10-16 818
全部0条评论

快来发表一下你的评论吧 !
