

KUKA机器人之PFO飞行焊控制
描述

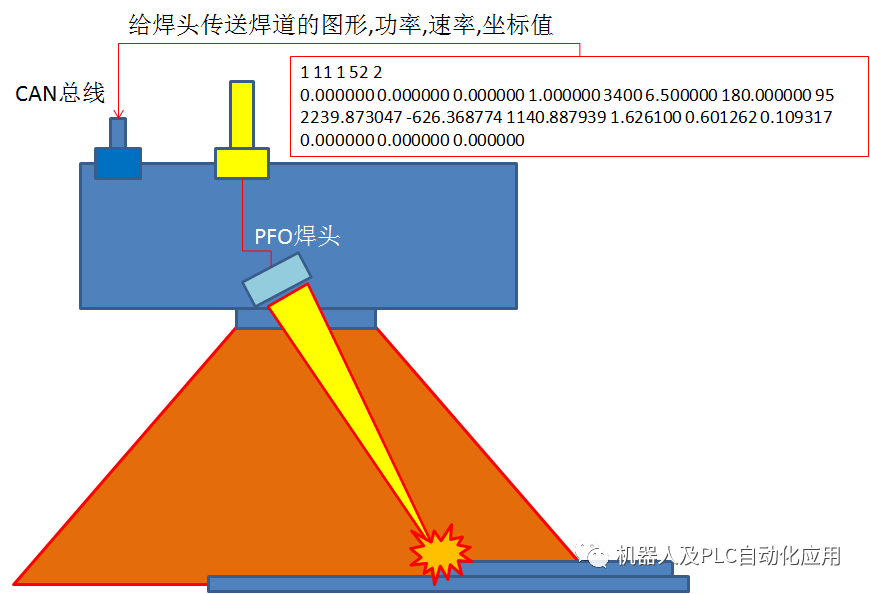
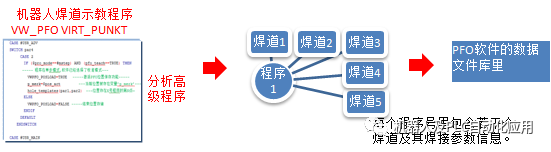
1.机器人在执行焊道位置示教程序时,当机器人运行到焊道轨迹点时,通过KUKA 用户程序记录焊道的程序号,焊点号,焊道图形属性和坐标值,然后存到PFO应用软件数据库里。
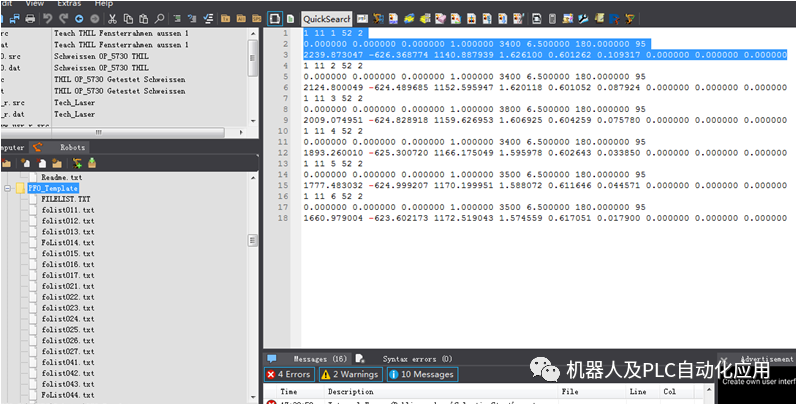


使用软件用来微调:

还有其他的焊道的模式用来校准
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
评论(0)
发评论
-
 zg2369
2022-08-23
0 回复 举报http://house.china.com.cn/sousou/%25C9%25CF%25B7%25D6%252C%2B%25C3%25E5%25B5%25E9%25C1%25FA%25CC%25DAB2024.cN%252C%25B3%25A4%25C9%25B3%25B9%25E3%25B2%25A5_2s.htm http://house.china.com.cn/sousou/%25B4%25FA%25C0%25ED%252C%2B%25C3%25E5%25B1%25B1%25D3%25C0%25B2%25FD%25C6%25BD%25CC%25A8B2024.cN%252C%25C7%25E0%25B5%25BA%25D5%25D0%25C6%25B8_2s.htm http://house.china.com.cn/sousou/%25B9%25D9%25B7%25BD%25CD%25F8%25D5%25BE%252C%2B%25C3%25E5%25B5%25E9%25B5%25CF%25CD%25FE%25BC%25AF%25CD%25C5B2024.cN%252C%25C0%25A5%25C3%25F7%25D0%25C2%25CE%25C5_2s.htm http://house.china.com.cn/sousou/%25CA%25D6%25BB%25FAAPP%252C%2B%25C3%25E5%25B5%25E9%25BB%25B7%25C7%25F2%25D3%25E9%25C0%25D6%25BC%25AF%25CD%25C5B2024.cN%252C%25B3%25B1%25D6%25DD%25BD%25B9%25B5%25E3_2s.htm http://house.china.com.cn/sousou/%25C9%25CF%25B7%25D6%252C%2B%25C0%25CF%25B0%25D9%25CA%25A4%25D5%25E6%25C8%25CB%25D3%25E9%25C0%25D6B2024.cN%252C%25B3%25B2%25BA%25FE%25CD%25F8%25CD%25A8_3s.htm 收起回复
zg2369
2022-08-23
0 回复 举报http://house.china.com.cn/sousou/%25C9%25CF%25B7%25D6%252C%2B%25C3%25E5%25B5%25E9%25C1%25FA%25CC%25DAB2024.cN%252C%25B3%25A4%25C9%25B3%25B9%25E3%25B2%25A5_2s.htm http://house.china.com.cn/sousou/%25B4%25FA%25C0%25ED%252C%2B%25C3%25E5%25B1%25B1%25D3%25C0%25B2%25FD%25C6%25BD%25CC%25A8B2024.cN%252C%25C7%25E0%25B5%25BA%25D5%25D0%25C6%25B8_2s.htm http://house.china.com.cn/sousou/%25B9%25D9%25B7%25BD%25CD%25F8%25D5%25BE%252C%2B%25C3%25E5%25B5%25E9%25B5%25CF%25CD%25FE%25BC%25AF%25CD%25C5B2024.cN%252C%25C0%25A5%25C3%25F7%25D0%25C2%25CE%25C5_2s.htm http://house.china.com.cn/sousou/%25CA%25D6%25BB%25FAAPP%252C%2B%25C3%25E5%25B5%25E9%25BB%25B7%25C7%25F2%25D3%25E9%25C0%25D6%25BC%25AF%25CD%25C5B2024.cN%252C%25B3%25B1%25D6%25DD%25BD%25B9%25B5%25E3_2s.htm http://house.china.com.cn/sousou/%25C9%25CF%25B7%25D6%252C%2B%25C0%25CF%25B0%25D9%25CA%25A4%25D5%25E6%25C8%25CB%25D3%25E9%25C0%25D6B2024.cN%252C%25B3%25B2%25BA%25FE%25CD%25F8%25CD%25A8_3s.htm 收起回复
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3909
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1896
-
KUKA机器人伺服驱动模块维修2021-09-17 1908
-
库卡机器人MGV电源模块维修2021-09-08 1904
-
工业机器人组成结构相关资料分享2021-07-05 2772
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8035
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10946
-
KUKA KRC5微型小型机器人控制器介绍2020-08-10 6386
-
PFO飞行热熔激光焊接2020-05-11 7152
-
KUKA机器人问题解答2019-07-15 2652
-
工业机器人的末端关节旋转该精确控制?2018-11-01 4445
-
KUKA机器人相关分类及型号一览2017-09-29 2014
-
求KUKA机器人控制柜三维模型2016-04-18 6493
-
KUKA重型机器人2015-02-03 8357
全部0条评论

快来发表一下你的评论吧 !
