

深度解析:Ouster OS0超广角短距激光雷达
描述
超广角短距激光雷达是当前最新、发展更快的激光雷达细分市场。在18个月前,Ouster便开始与一家汽车OEM合作,研发超广角短距激光雷达OS0,用于满足自动驾驶汽车、机器人及地图等市场的特定需求。
通过与合作伙伴的沟通及获得的客户反馈,我们确定了三个在实际应用中最重要的性能(除了超广视场角外):
(1)对于目标物探测:高分辨率;
(2)对于近距离探测:0 cm最小探测距离;
(3)对于3D地图构建:高精度。
而对于任何应用,OS0均可提供:90º垂直视场角 + 260万点/秒(MPS)的高分辨率数据输出 + 0 cm最小探测距离 + 高达毫米级的精度。
对于自动驾驶、机器人、地图等对激光雷达有较高性能要求的客户,OS0更是首选的超广角激光雷达。
由红外相机拍摄的OS0,90º垂直视场角
除了超广视场角之外,OS0能够探测到55 m处反射率为 80% 的物体以及15 m处反射率为10%的物体。探测距离对于短距激光雷达来说并不是最重要的因素,但当用作自动驾驶汽车盲区探测或低速机器人的唯一传感器时,能够探测到50 m又是非常有利的。
本文我们将深度分析OS0的关键性能,说明这些性能对于感知、定位、地图等应用的意义,并证明OS0在某些方面的表现是现有市场同类产品中最好的。
OS0特有的四大关键性能:
(1)90º 超广垂直视场角;
(2)128线超高分辨率;
(3)0 cm最小探测距离;
(4)毫米级精度。
90º超广垂直视场角
OS0为短距离物体探测提供了90º的超广垂直视场角,宽广的视场角有助于优化定位算法、加速室内3D地图构建。
OS0实测,距离仓库货架2m
对于机器人应用来说,90º的视场角可以完整捕捉整个货架的情况,满足在室内运货的需求,同时还能为精准定位提供额外的特征数据。
完整仓库运货视频:
对于自动驾驶汽车来说,OS0的大视角可以探测到距离车辆1米的、从头到脚的、完整的行人。通过在车辆的四周安装OS0,即可获得车身360º 的完整数据,确保汽车能够“看见”周围的孩童、宠物、路沿、路障等更小的物体。
尤其对于定位来说,OS0最大可覆盖路旁3层高的建筑,如此大的覆盖率可以为定位算法提供更多的特征数据,有助于提高定位的效率和准确率。
对于室内地图构建来说,凭借OS0的超广视场角,可以实现用更少的扫描次数覆盖更广的空间范围,从而在减少地图构建所需时间的同时,提供其所需的高精度数据。
128线超高分辨率
Ouster自主研发的数字激光雷达技术具有一大优势,即在激光雷达分辨率不断提升的同时,产品的尺寸、重量和功耗都不会发生任何变化。今年二月,Ouster发布了全新第二代激光雷达,其分辨率均提升至128线,但其外观尺寸与第一代64线激光雷达完全一样。
OS0-128实测点云1
高分辨率最大的意义在于,将激光雷达从简单的避障技术变成了目标物体探测、分割和分类的主流传感器。数字激光雷达具备的超高分辨率表现也是Apple选择将其应用于新版iPad Pro的原因之一。
“OS0每秒输出点数为260万个,是现有市场上短距激光雷达的5倍。”
在超广角短距激光雷达市场,当前最好的机械旋转激光雷达最高仅可提供64线的垂直分辨率,而OS0最高可提供128线。高出两倍的分辨率,一方面可以实现算法对更远处物体的识别分类,另一方面可以提高激光雷达在探测范围内所有距离处的置信度。OS0每秒输出点数为260万个,是现有市场上短距激光雷达的5倍。
OS0-128实测点云2
为了更好的理解分辨率带来的优势,我们可以认为标准算法对行人进行识别分类时,需要对象人物身上有大约4条水平数据线,此时对应的最大距离称为“有效距离”。一台90°垂直视场角的64线激光雷达,其有效距离为20 m;而一台90°垂直视场角的128线激光雷达,其有效距离可提升50%,即超过30 m。如下图:
OS0系列分辨率对比,有效距离:OS0-32为10 m,OS0-64为20 m,OS0-128为30 m
另一个实例,假设有一辆以每小时40公里行驶的自动驾驶汽车,即其每秒行驶约10米,在该速度下的制动距离约为15米。这意味着,当使用64线激光雷达时,自动驾驶汽车只有0.5秒的时间留给算法来识别行人并启动制动(64线激光雷达的有效距离为20 m,当汽车距离对象行人20 m处时,算法可以得到足够的数据来识别行人,当汽车距离对象行人15 m时,必须开始刹车,因此留给算法识别及启动制动的时间只有5 m,即0.5 s);同样的情况下,128线激光雷达可以为汽车提供3倍多的时间去反应,即1.5 s或15 m(30 m有效距离 – 15 m制动距离)。
OS0-128的高分辨率可以使激光雷达探测到更小的物体,如下图,从左到右分别是网球、小型路障、橄榄球、轮胎、大型路障、垃圾桶。OS0-128可以非常清楚的探测到距离2 m处的网球。
目标物体与激光雷达之间的距离为2 m
0 cm最小探测距离
为了更好的实现近距离探测,OS0做到了0 cm的最小探测距离。这是如何实现的呢?对于距离激光雷达25 cm处的物体,OS0将返回对应的点云数据;而对于距离激光雷达25 cm内的物体,OS0将返回一个标志,这个标志就意味着25 cm内有物体存在(该标志在点云中不可见,直接在数据流中输出)。
我们将OS0放在空旷的停车场进行实测演示。在下面的视频中,OS0获得点云数据的最小距离为25 cm,甚至在40 cm处,OS0也可以清楚地分辨出张开的手指之间的缝隙。凭借高分辨率,OS0可以准确的识别仓库里或道路上的小型物体。同样,在激光雷达25 cm内的物体所返回的标志在以下点云中不可见,而是直接在激光雷达的数据流中输出。
毫米级精度
Ouster对所有的激光雷达都进行了一系列的测试,其中就包括测距和精度测试,以确保每个激光雷达都符合既定的规格。
激光雷达的精度在不同的探测距离处是不同的。简而言之,激光雷达的精度会沿着像耐克商标一样的形状变化。在激光雷达最小测距附近的精度会稍微差一点,其原因类似于看鼻子上的物体比较模糊,只有将这一物体移到离脸远一点的地方才可以看清。当目标逐渐偏离最小测距时,精度会提高到一个点,然后再次稳定地下降直到激光雷达达到最大测距。
OS0测距和精度测试
我们对OS0进行了实测演示,测距范围为25 m,目标物体反射率为10%。如下表所示,在1 m以内,激光雷达的精度可达到±0.5 cm,而在1米处该精度降至±1 cm;当目标物移动至距离激光雷达1-10 m之间时,精度提高到±0.9 cm;超过10 m后,精度在25 m处几何衰减至±5 cm。
OS0精度实测 – 目标物体反射率为10%:
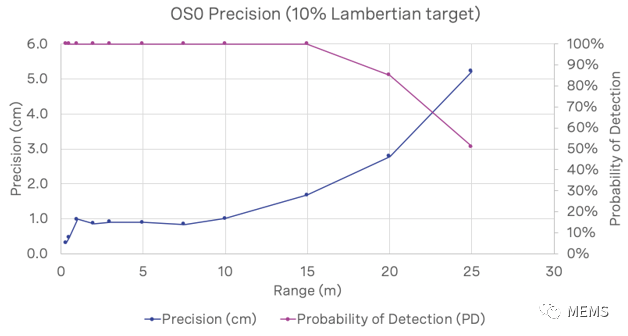

OS0毫米级的精度是现有市场上最高的精度,这使得OS0成为室内地图构建的理想解决方案。
另外,我们还对激光雷达进行了“四壁测试”。在此测试中,我们将激光雷达放在房间的中央,然后定性比较OS0与其他激光雷达探测到的墙壁厚度。激光雷达的精度越高,探测到的墙壁越“薄”。
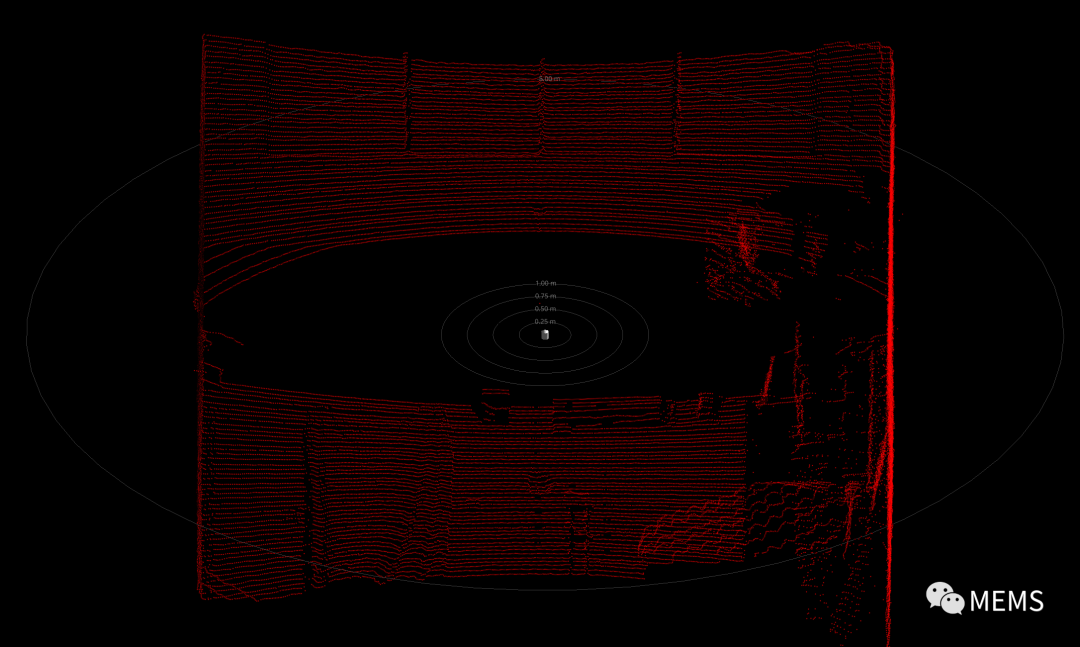
OS0探测到的墙壁点云数据,房顶和地面的线已被隐藏
我们还测试了墙壁的线性度及任何变形或弯曲。在下面的图像中,可以看到OS0探测到的墙壁比市场上领先的16线中距传统模拟激光雷达更薄,即精度更高。
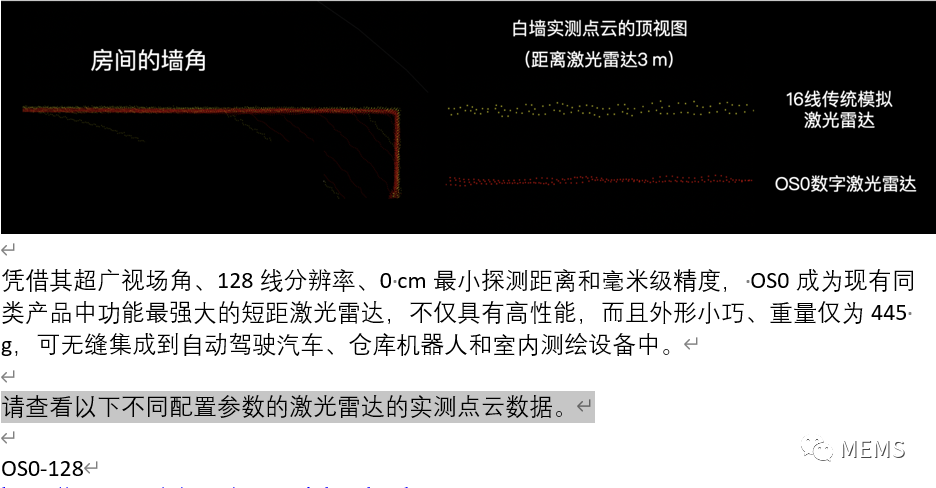
凭借其超广视场角、128线分辨率、0 cm最小探测距离和毫米级精度, OS0成为现有同类产品中功能最强大的短距激光雷达,不仅具有高性能,而且外形小巧、重量仅为445 g,可无缝集成到自动驾驶汽车、仓库机器人和室内测绘设备中。
-
激光雷达分类以及应用2017-09-19 8929
-
常见激光雷达种类2017-09-25 14039
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 5796
-
激光雷达2021-01-17 20225
-
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观2021-03-18 3200
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30535
-
基于深度神经网络的激光雷达物体识别系统2021-12-21 3937
-
Ouster发布两款新型高分辨率激光雷达传感器,为自动驾驶提供更安全的技术2020-01-14 1828
-
Ouster推出了两款新型的高分辨率数字激光雷达传感器2020-01-13 1952
-
Ouster发布超宽视场角激光雷达,提供更丰富的分辨率选择2020-01-29 4243
-
基于其独有数字激光雷达架构而研发的最新高性能固态激光雷达:ES22020-10-09 6380
-
Ouster正式发布首款高性能固态激光雷达传感器2020-10-12 4620
-
Ouster发布最新OS REV7系列数字激光雷达2022-10-20 2111
-
Ouster全新激光雷达传感器问市,可使用128通道分辨率2023-04-06 1967
-
Ouster正式发布全新OS数字激光雷达传感器系列Rev82026-05-15 1359
全部0条评论

快来发表一下你的评论吧 !
