

单片机开发串口是应用最为广泛的通信接口
接口/总线/驱动
描述
[导读] 单片机开发串口是应用最为广泛的通信接口,也是最为简单的通信接口之一,但是其中的一些要点你是否明了呢?来看看本人对串口的一些总结,当然这个总结并不能面面俱到,只是将个人认为具有共性以及相对比较重要的点做了些梳理。
啥是串口?首先这玩意儿分两种:
通用异步收发器(UART)是用于异步串行通信的一种物理层标准,其中数据格式和传输速度是可配置的。
通用同步收发器(USART)是一种串行接口设备,可以对其进行编程以进行异步或同步通信。
数据格式
线上空闲、无数据状态为常高电平,故逻辑低定义为起始位。
起始位:总是 1 位
数据位:常见的有 8 位或 9 位。
校验位
奇校验
偶校验
无校验
停止位:
1 位
2 位
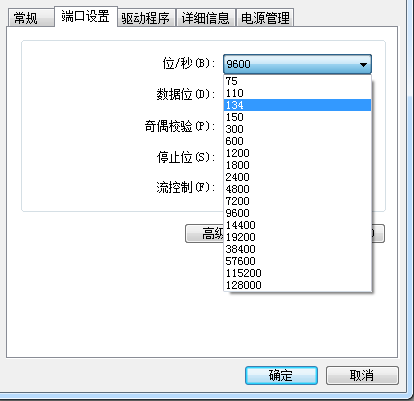
波特率:bit rate 就是位/秒的概念,就是 1 秒传送多少位的概念。常见的波特率有哪些呢?
这里须注意的要点:
一个有效字节的传输时间怎么算?
比如 9600 下,1 位起始位,8 位数据位,奇校验,1 位停止位,则
为什么要理解清楚这个概念呢,因为在应用中需要计算数据吞吐率问题,就比如一个应用是数据采集串口传输问题,需要计算采集的位速率需要小于或等于传输波特率,否则数据就来不及传。当然如果说你有足够大的缓冲区可以临时存储,但是如果进来太快,而传出速度跟不上,多大的缓冲都会满!
校验位有用吗?当你的传输介质处于一个有干扰的场景下,校验位就可以从物理层检测出错误。
理解数据编码方式有啥意义呢?比如在调试中你可以利用逻辑分析直接去解析收发线上的数据报文。
应用电路设计的时候 RX-TX 相连,很多初学者容易在这里踩坑!
常见的传输位序为低有效位在前。
对于波特率而言需要注意波特率发生器有可能带来误码问题
啥是 UART?
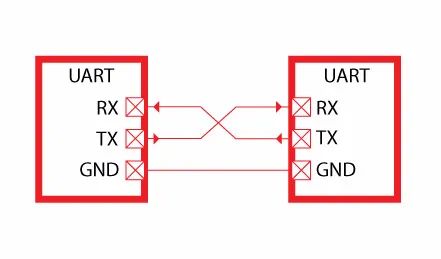
两边分别代表两个通信的设备,单从 UART 编程的角度讲收发不需要物理同步握手,想发就发。图中箭头代表数据信息流向。RX 表示接收数据,TX 表示发送数据。数据总是从发送端传递到接收端,这就是为啥 RX 连接 TX,TX 连 RX 的原因。
啥是 USART?
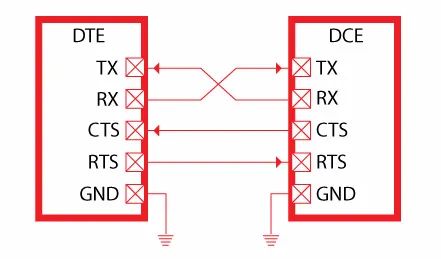
同步简单说,收发不可自如,不可以想发就发,收发需要利用硬件 IO 口进行握手,RTS/CTS 就是用于同步的握手信号:
RTS:Ready to send,请求发送,用于在当前传输结束时阻止数据发送。
CTS:clear to send,清除发送,用于指示 USART 已准备好接收数据。
这个对于普通应用而言并不常见,这里不做详细展开,需要用到的时候只需要对应收发时控制握手信号即可。
编程策略对于不同的单片机,其硬件体系各异,寄存器也差异很大,但是从收发编程策略角度而言,常见有下面三种方式:
查询发送/中断接收模式
收发中断模式
DMA 模式
查询发送/中断接收模式这里以伪代码方式描述一下:
/*查询发送字节*/
void uart_send_byte( uint8 ch )
{
/*如果当前串口状态寄存器非空闲,则一直等待*/
/*注意while循环后的分号,表示循环体为空操作*/
while( !UART_IS_IDLE() );
/*此时将发送字节写入发送寄存器*/
UART_TX_REG = ch;
}
/*发送一个缓冲区*/
void uart_send_buffer( uint8 *pBuf,uint8 size )
{
uint8 i = 0;
/* 异常参数处理*/
if( pBuf == NULL )
return;
for( i=0; i《size;i++ )
{
send_byte( pBuf[i] );
}
}
对于接收而言,如采用查询模式则几乎是没有任何应用价值,因为外部数据不知道什么时候会到来,所以查询接受就不描述了,这里描述一下中断接收。
static uint8 rx_index = 0;
void uart_rx_isr( void )
{
/* 接收报文处理 */
rx_buffer[rx_index++] = UART_RX_REG;
}
中断接收需要考虑的几个要点:
断帧:这就取决于协议怎么制定了,比如应用协议定义的是 ASCII 码方式,就可以定义同步头、同步尾,比如 AT 指令的解析,做逻辑判断帧头、帧尾即可。但是如果传输的是 16 进制数据,比如 MODBUS-RTU 其断帧采用的是 3.5 个字节时间没有新的字节接收到,则认为收到完整的帧了。
如何保证帧的完整性,一般会在报文尾部加校验,比较常用的校验模式有 CRC 校验算法。
不同的单片机开发环境对于中断向量的处理方式略有不同,需要根据各自芯片的特点进行处理。比如 51 单片机,其发送/接收都共享一个中断向量号。
收发中断模式#define FRAME_SIZE (128u)
static uint8 tx_buffer[FRAME_SIZE];
static uint8 tx_index = 0;
static uint8 tx_length = 0;
static uint8 rx_buffer[FRAME_SIZE];
static uint8 rx_index = 0;
static bool rx_frame_done = false;
void prepare_frame( uint8 * pBuf, uint8 size )
{
/*将待传的报文按照协议封装*/
/*可能需要处理的事情,比如帧头、帧尾、校验等*/
}
bool uart_start_sending( uint8 * pBuf, uint8 size )
{
if( pBuf == NULL )
return false;
memcpy( tx_buffer,pBuf,size );
tx_index = 0;
tx_length = size;
/*使能发送中断,向发送寄存器写入一个字节,进入连续发送模式*/
ENABLE_TX_INT = 1;
UART_TX_REG = tx_buffer[tx_index++];
}
void uart_tx_isr( void )
{
if( tx_index《tx_length )
{
UART_TX_REG = tx_buffer[tx_index++];
}
else
{
/*发送完毕,关闭发送中断*/
DISABLE_TX_INT = 1;
}
}
void uart_rx_isr( void )
{
/*处理接收,待接收到完整的帧就设置帧完成标记*/
/*由于应用各有不同,这里就无法描述实现了*/
}
还需要考虑的是,对于 UART 硬件层面的出错处置,以 STM32 为例,就可能有下面的错误可能发生:
溢出错误
噪声检测
帧错误
奇偶校验错误
另外不同的单片机其底层硬件实现差异也不较大,比如有的硬件发送缓冲是单字节的缓冲,有的则具有 FIFO,这些在选型编程时都需要综合考虑。
DMA 模式DMA 发送模式而言,大致分这样几步:
初始化 UART 为 DMA 发送模式,开启 DMA 结束中断,并写好 DMA 传输结束中断处理函数
准备待发送报文,帧头、帧尾、校验处理
将待发送报文缓冲区首地址赋值给 DMA 源地址,DMA 目标地址设置为 UART 发送寄存器,设置好发送长度。
启动 DMA 传输,剩下传输完成就会进入传输结束中断处理函数。
DMA 接收模式而言,大致分这样几步:
初始化 UART 为 DMA 接收模式,开启 DMA 结束中断,并写好 DMA 传输结束中断处理函数
中断处理函数中标记接收到帧,对于使用 RTOS 而言,还可以使用的机制是利用 RTOS 的事件机制、消息机制进行通知有新的帧接收到了。
对于 DMA 接收模式而言,对于变长帧的处理较为不利,所以如果想使用 DMA 接收,制定协议时尽量考虑将帧长度固定,这样处理会方便些。
总结一下单片机串口是一个需要好好掌握的内容,这里总结了一些个人经验,尽量将一些个人共性的东西总结出来。至于实际实现而言,由于芯片体系差异较多,具体代码各异。但个人认为处置的思路方法却是基本一致。所以本文除了描述串口本身的细节而言,想表达的一个额外的观点是:
对于一些技术点尽量学会将其共性的东西剥离总结出来。
总结、概括、剥离抽象是一个比较好的学习思路,不用对具体的硬件死记,万变不离其宗。
如果本文有喜欢的朋友,后面陆续可以总结一下I2C/SPI等常用接口。
责任编辑:pj
-
单片机串口通信的接收与发送2023-12-20 5893
-
51单片机串口配置方法2023-04-14 7977
-
万变不离其宗之单片机串口共性问题2022-01-26 433
-
51单片机——串口通信2021-11-23 1803
-
51单片机串口通信2021-11-18 1353
-
串口通信详解(51单片机)2021-11-12 1896
-
基于STM32单片机的串口通信资源2021-07-05 1879
-
万变不离其宗的单片机串口共性问题2020-12-15 994
-
如何使用51单片机实现串口通信2018-11-21 31397
-
什么是单片机的串口通信?2018-07-25 62498
-
DSP与单片机串口通信的设计与实现2017-10-20 1275
-
单片机串口通信485modbus2016-07-12 1106
-
51单片机与串口通信代码2011-11-09 1051
-
学单片机之串口通信2010-02-10 711
全部0条评论

快来发表一下你的评论吧 !
