

五种控制器抗积分饱和的方法
控制/MCU
描述
1、积分饱和的概念
有积分特性的控制器普遍存在积分饱和问题,就是说,这种控制器只要偏差没有消失,其输出就会按偏差的极性向两个极端位置(最大或最小)的方向变化。这样就会出现控制器或执行器损坏,并因克服反向扰动的速度降低而恶化系统的控制品质。对于前者,无需多加说明对于后者,可用图1来说明。当控制器输出达到规定的上、下限时,执行器已处于饱和状态,即Pout继续增加,执行器也不会继续动作。因为控制器做了虚拟的控制动作,故通过控制器的介质不会改变。一旦控制系统出现扰动,使控制偏差的极性变反,控制器的输出要慢慢从深饱和区退出,直到处于信号范围才能改变控制介质的流量。就是说,从P1点退到控制系统开始起作用的P2点,要耽误从P1点到P2点的运动时间,即在T1至T2的时间内,控制系统不起任何作用。
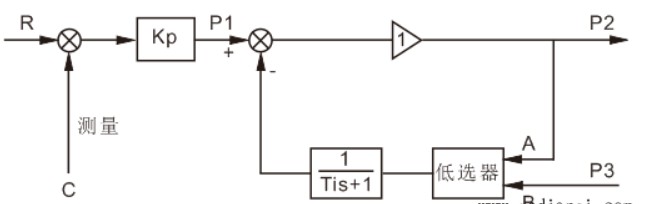
图1 控制器的工作区和深饱和区
2、防积分饱和的方法
①采用比例控制器
这是防积分饱和的最简单的方法,但会使系统产生静差。因此,该方法作为防积分饱和措施而言是很少采用的,也不值得推荐。
②采用限幅装置
采用某种形式的限幅是防积分饱和的另一种方法。工业上应用的气动控制器都配有限幅装置。根据限幅装置的限幅范围,可使控制器的输出不超越控制器所限定的输出范围。严格地说,这种输出限幅并不是真正的防积分饱和,只是限幅装置把送给控制阀的信号限制住而已,并不能改善克服反向扰动的控制品质。
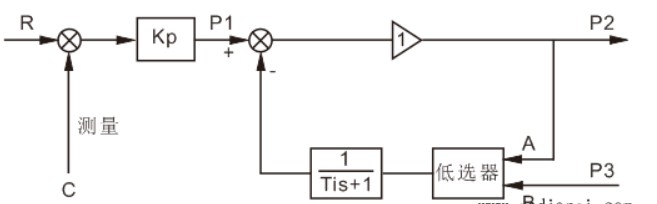
图2 PI控制器的结构改进
③对现有的PI控制器进行改进
许多控制器的积分网络与控制器的输出是固定的内部联系。现可用外部接线加以改进,如图2所示。控制器输出接入低选器的一个输入端,控制器防饱和点的相应信号P3接入低选器的另一端。当控制器的输出还没有达到开始饱和点(P2<P3),低选器隔断控制器输出与积分网络的联系,选中P3作为积分网络的输入,达到防积分饱和的目的。这种结构改进的关键是如何设计饱和点信号P3。
④采用PD控制器
这是较为实用的方法。采用PD控制器能减少超调,与纯比例控制器相比,还能减少系统的静差,但不能消除静差。如允许有较小静差时,则采用PD将优先于PI,即不存在积分饱和问题。
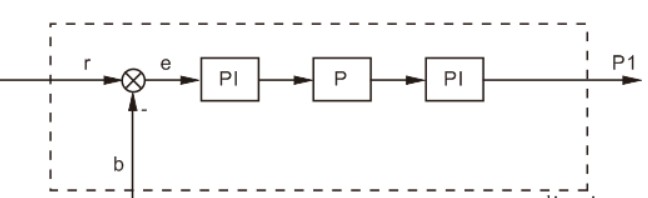
图3 串联PID控制器原理图
⑤采用串联PID控制器
当负荷和设定值可能发生变化,而超调和静差又不允许存在时,解决积分饱和的最好办法是采用串联PID控制器,它的简单原理框如图3所示。
责任编辑:tzh
-
经典PID控制器的积分分离优化算法2020-11-04 8762
-
一文解析PID的积分抗饱和原理2021-03-22 11008
-
无刷直流电机抗饱和变结构PI控制研究2025-06-27 598
-
PID控制器开发笔记之三:抗积分饱和PID控制器的实现2018-05-05 5629
-
使用商用电流检测变压器设计一种可抗饱和的电路2019-07-18 2325
-
一种简单的PID控制器调整方法2020-09-01 3408
-
自适应模糊自抗扰控制器的研究与设计2009-08-25 1303
-
一种积分过程PID自整定方法2010-03-18 581
-
挠性航天器LMI抗饱和控制及模态振动抑制2017-01-07 856
-
基于分数阶微积分的PID控制器方法2017-11-09 1957
-
电流互感器饱和识别方法2018-01-29 2006
-
PID控制器之比例加积分加微分控制规律2020-06-19 5506
-
一文详细解析到底什么是积分饱和2021-04-05 26561
-
五种降低微控制器能耗的技术2022-07-21 2289
-
如何解决并网逆变器的重复控制器积分饱和问题2023-03-02 654
全部0条评论

快来发表一下你的评论吧 !
