

机器人的电机位置测量元件
描述
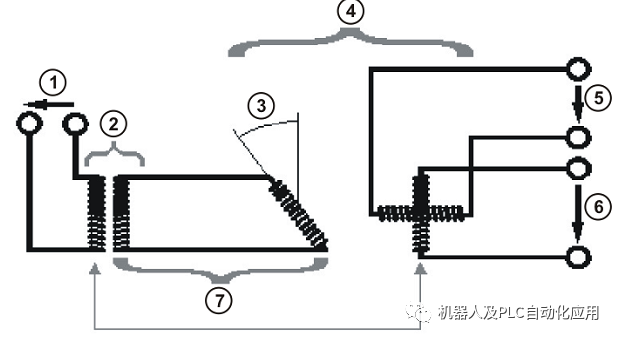
分解器:分解器用于分析处理轴的当前位置,是一种旋转式行程测量系统。
1转子
2定子
3 正弦线圈和余弦线圈
4 转子线圈
5 旋转式变压器
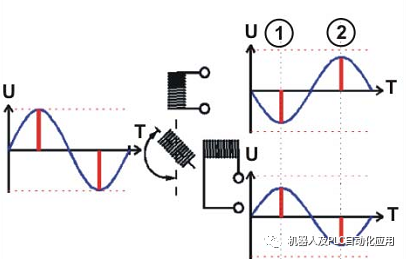
转子 (3)通过旋转式变压器 (2)接受一个电压装置 (1)的供电 (频率 = 8kHz)。在定子线圈 (正弦线圈和余弦线圈;5.6)内,通过感应引起与转子位置成比例的电压。
1 输入电压 (8 kHz)
2 旋转式变压器
3 转子线圈
4 自动同步机
5 正弦线圈
6 余弦线圈
7 转子
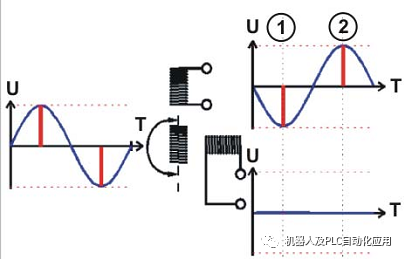
电压随着转子的旋转而变化。
感应引起的电压在两个测量点 (1,2)接受探测和评估。
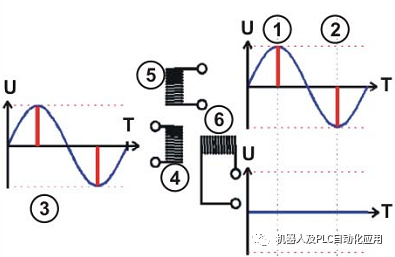
1 第一探测点
2 第二探测点
3输入电压
4转子线圈
5 正弦线圈
6 余弦线圈
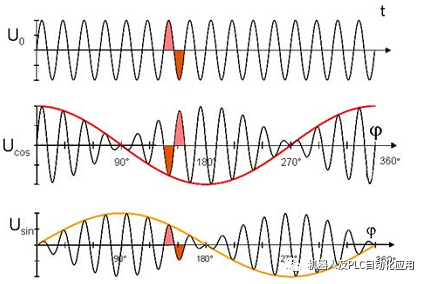
U 电压
T 时间
旋转 30 度角时的分解器感应
旋转 90 度角时的分解器感应
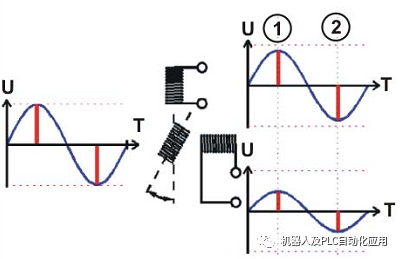
旋转 135 度角时的分解器感应
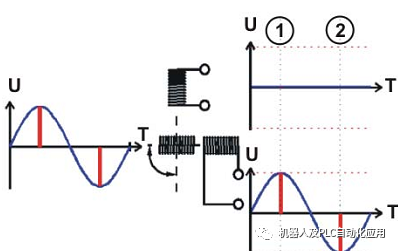
旋转 180 度角时的分解器感应
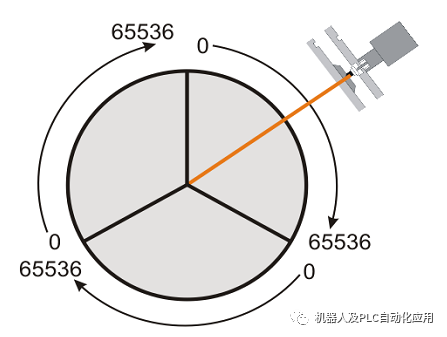
在库卡采用的分解器中,各设有 3 个正弦线圈和余弦线圈。
这样,电机每一圈机械式旋转就等于分解器电旋转 3x120 度角。
电旋转一圈等于 65536 个增量 (16 比特)。
分解器每一圈机械式旋转则等于 196608 个增量 (3*65536 增量)。
分解器以增量的形式提供位置数据 (16 Bit)。
这些位置数据在 RDC 内乘上一个内部演算系数,并换算成电机角度度数。
在 EDS 里,可保存每条轴的绝对位置值 (64 Bit)。
从该时间点开始,只能继续利用电机角度值来计算。
在校准位置并非所有轴都已设为 0° 或 90°,而是准确数据已保存在机器数据里 ($mames)
$mames[n]:轴n 的机械和数学零点之间的偏移
REAL $MAMES[12]
$MAMES[1]=-20.0000
$MAMES[2]=-120.000
$MAMES[3]=110.000
$MAMES[4]=0.0
$MAMES[5]=0.0
$MAMES[6]=0.0
零点校正就是对机器人的分解器进行校准.
机器人位置在极短时间间隔内、机器人停止运行时或机器人控制系统关机时被
持续保存。
1.如果两个数值相等,则将绝对位置应用到增量里,机器人也就准备就绪可以运行。
2.如果两个数值存在偏差,则必须重新校准机器人。HMI 里将显示与此相关的一条讯息.
-
霍尔元件DH49E在机器人的关节位置中的应用2025-02-20 3701
-
关于机器人的电机位置测量元件2023-01-17 3473
-
机器人舵机调试系统2021-07-12 1631
-
ABB焊接机器人伺服电机维修常见故障相关资料分享2021-06-28 1843
-
API RMS机器人测量软件2020-10-28 3306
-
安川机器人伺服电机维修,常见机器人伺故障服电机和维修方法2020-06-30 6797
-
如何使用电机位置传感器来测量定子与转子之间的相对位置2020-05-04 7807
-
拆开工业机器人,让你见识机器人驱动系统中的电机种类2018-10-30 6934
-
盘点机器人常用的三种电机2018-10-25 5385
-
如何选择机器人电机2018-10-19 2730
-
电机位置编码器接口设计2017-11-17 3424
-
工业机器人的产业链2017-08-23 4624
-
机器人辅助测量系统——灵活加工2015-02-11 4235
全部0条评论

快来发表一下你的评论吧 !
