

KUKAC2机器人ESC的电器连接
描述

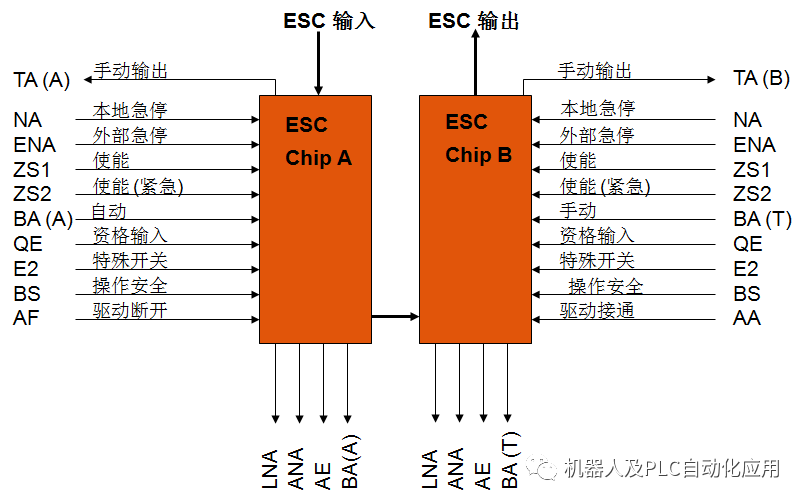
故障安全输入
NA - 本地急停
ENA - 外部急停
ZS1 - 使能输入
ZS2 - 使能, 紧急位置
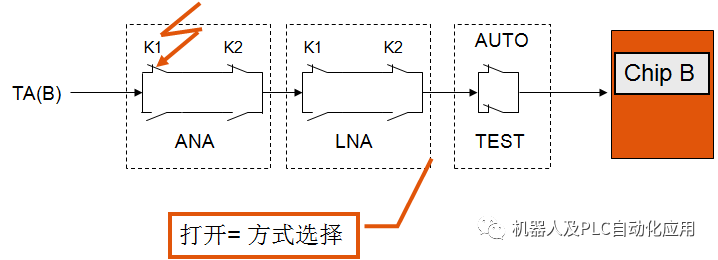
BA - 操作方式 (手动/自动)
QE - 资格输入 (装载位置, 范围限制)
BS - 操作安全输入 (安全门)
控制器输出
AA - 驱动接通
AF - 驱动断开
故障安全输出
AE - 驱动接通(驱动接触器)
LNA - 外部急停
ANA -系统急停
BA - 操作方式 (手动/自动)
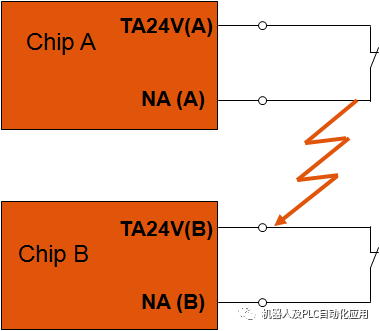
·输入信号两个通道的短路
·输入信号的一个通道和电源短路
·通讯错误 (例如:安全总线中断)
·硬件错误 (例如:检测输出继电器触点损坏)
·ESC 芯片损坏
ESC 节点结构
软件和硬件安全功能
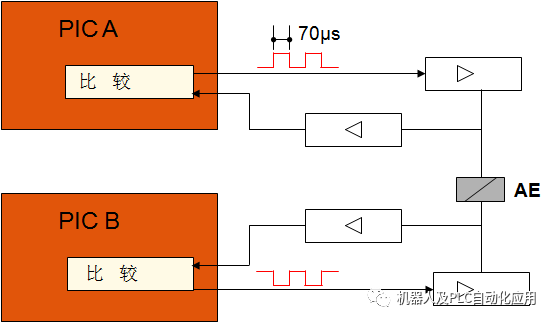
每个PIC发送一个脉冲给输出并比较这个脉冲的返回信号
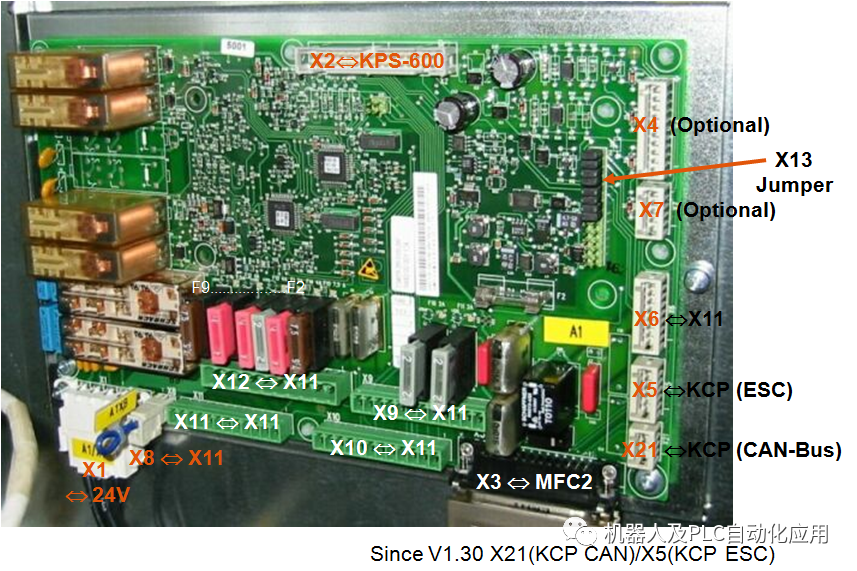
F10: Fks2A Vcc-Esc
F11: Fks2A Vcc-Esc
F12: Fks4A 外围接口 Vcc
F13: Fks4A 外围接口 Vcc
F16: Fks7.5A 外围接口 Vcc
F14: Fks4A 驱动接通
F15: Fks7.5A 驱动接通
F1: Fks2 A 驱动接通
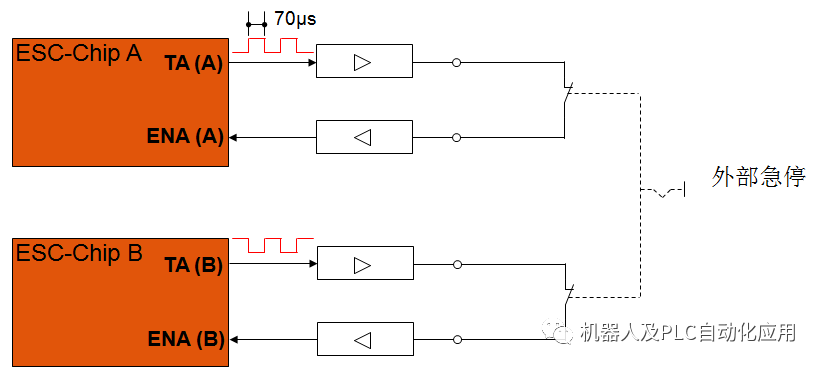
ESC-错误识别
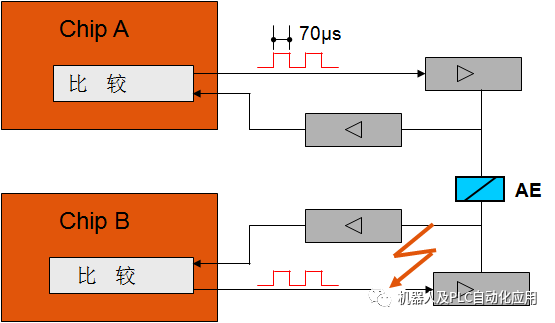
每个芯片传一个脉冲给他的输出,并且用这个样本比较传导的信号不一致的输出定位安全状态.
AE LNA ANA
循环1 1 0 1
循环2 0 1 0
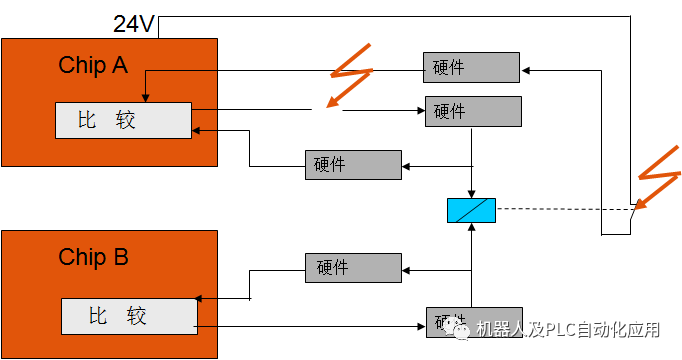
每个芯片比较输出信号和返回信号.不一致的输出定位安全状态.
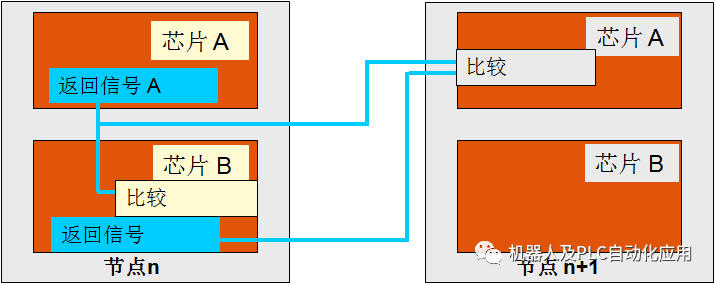
芯片 B 比较 A和 B 自己节点的文本文件
芯片 A 比较 A 和 B上一个节点的文本文件
不一致的输出设为安全状态.
-
工业机器人的基本结构2015-01-19 9532
-
nao机器人与其他机器人的区别2015-02-13 6969
-
智能语音机器人2015-12-02 14263
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4126
-
机器人基础书籍2019-05-22 3655
-
工业机器人应用编程考核设备分享2021-07-01 2902
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 5442
-
什么是服务机器人2021-09-17 2260
-
机器人是什么?2022-03-31 22302
-
KUKAC2机器人程序备份更改路径2020-08-10 5433
-
KUKAC2机器人程序备份如何操作2020-12-23 10199
-
读取KUKAC4.8.3系统机器人轴参数2021-01-04 3927
-
KRC机器人在过程数据通信方面扮演各种角色2022-08-01 1296
-
介绍一下KUKAC2机器人关于INTERBUS PCI卡进行主从配置的文件2023-02-20 4271
-
KUKAC2机器人程序备份指导书2023-09-23 5833
全部0条评论

快来发表一下你的评论吧 !
