

FESTO气伺服焊钳气管接错后故障分析
描述
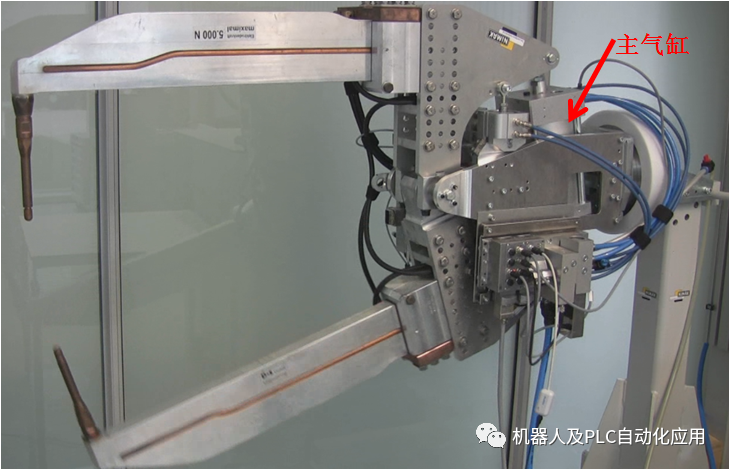
这次焊钳的气管接错,没有造成焊钳故障报警,但是在焊钳进行夹紧时出现卡顿现象.在作机器人E1轴移动时报拉拽故障.下面让我们分析一下气路.
伺服焊的第七轴(MQB)随动:
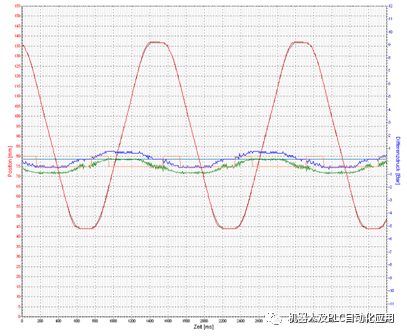
机器人运动过程中焊枪可以定位速度可在5% 到100 %之间变化机器人监控运动过程.
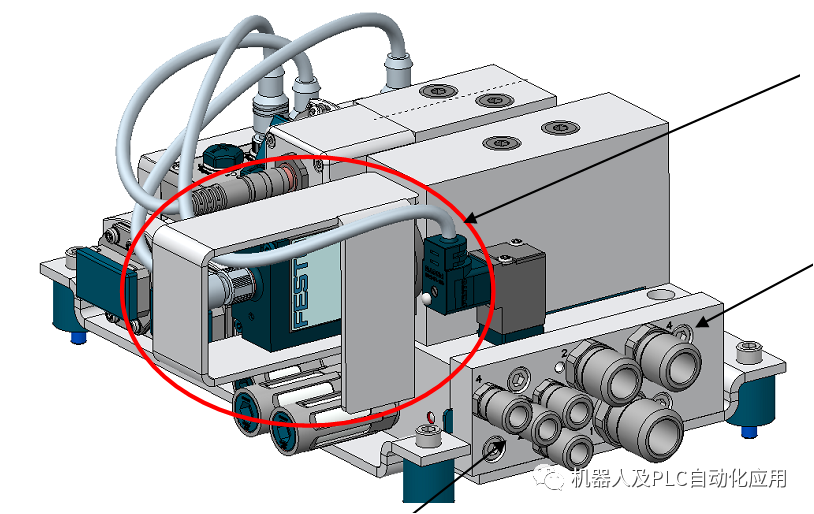
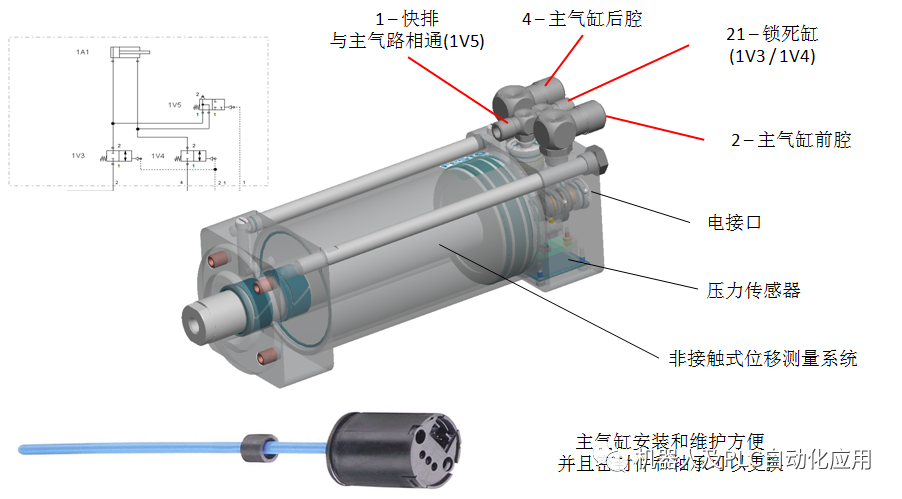
(FESTO伺服焊钳控制器)
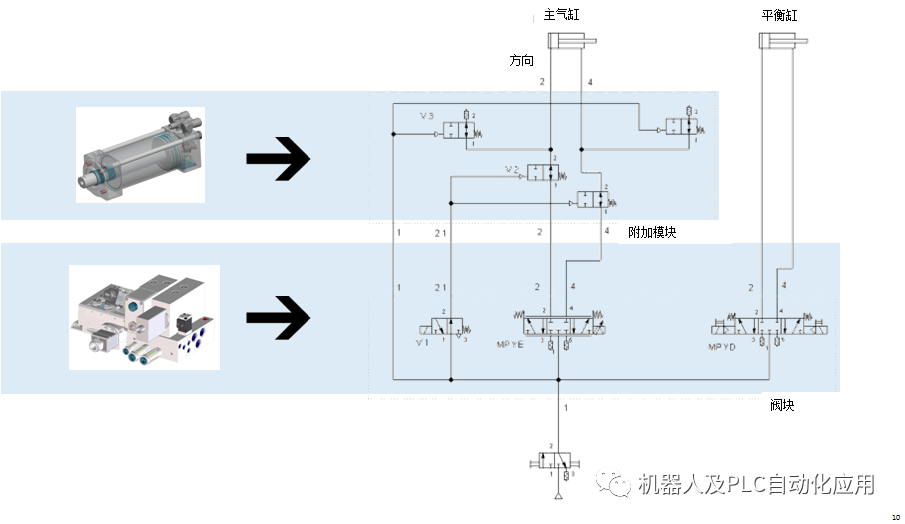
(气伺服焊钳气路图, 图中的MSEB阀与实际工作原理相反)
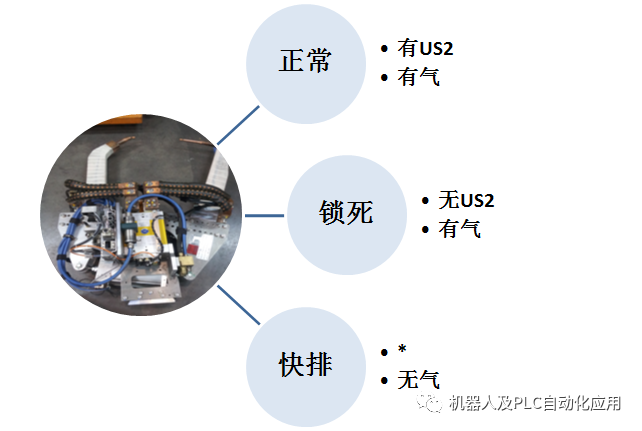
主气缸(C50)气管连接说明图:
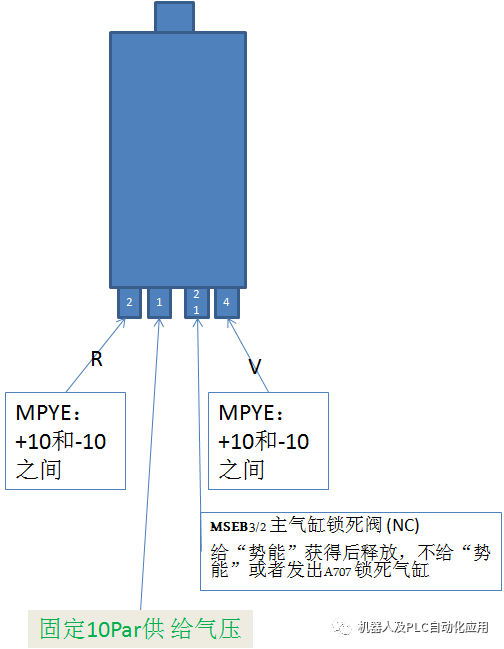
MSEB:控制锁死阀,给主气缸21的解锁压力不大
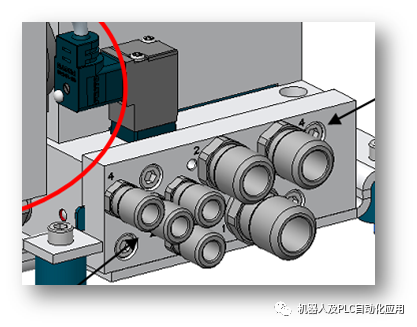
注意:阀座出气口的标号1/21是接到主气缸上的1/21的.
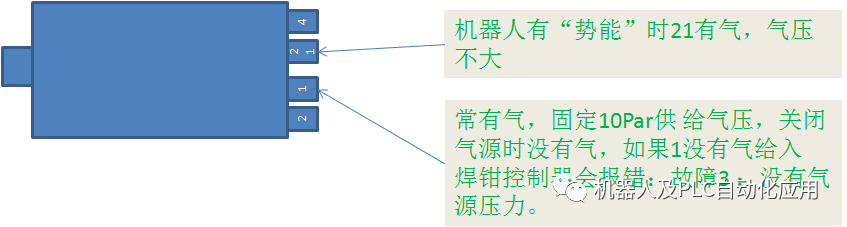
1.机器人有“势能”时21有气,气压不大(由MSEB阀控制).
2.主气缸1号管是常有气,气压很大,为10PAR气源的压力.
故障3 :没有气源压力。
主气缸气压连续4秒内小于1bar(注意:气源供给没有监控)。如果两边气腔内气压大于3bar,则该错误将自动消除。
没有E705焊钳准备就绪,E783压力过低, E784普通故障.
1.检查气源供给。检查气管连接。
2.检查主气缸附加块(隔断阀)。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电机常见故障原因分析及解决方案2015-06-23 6416
-
伺服电机故障原因排除2018-10-10 3128
-
宝德伺服电机常见故障及故障原因解析2020-07-11 6127
-
伺服驱动器上UVW电机动力线相序接错为什么会导致飞车2021-09-07 4076
-
三相伺服电机UVW可以接错吗2021-09-28 5664
-
电伺服焊钳铣削分析:用户铣削2020-06-11 3702
-
机器人主气缸C50气管连接说明2020-06-28 7208
-
气伺服焊钳平衡缸故障分析2020-08-10 3072
-
KUKAC4大众版机器人报"伺服焊钳的滞后故障分析"如何解决2021-01-03 9906
-
气伺服焊钳为什么会发出钳E1超出软件限制报警2022-07-26 2101
-
FESTO焊钳故障报警分析2022-08-15 2937
-
VASS KUKA电伺服焊钳的SG_Background控制2023-01-14 2688
-
气伺服焊钳的力超时故障分析2023-04-24 1447
-
伺服电机十大故障分析2023-04-28 1961
全部0条评论

快来发表一下你的评论吧 !
