

工业机器人详细的基本介绍
机器人
描述
一、工业机器人的基本组成
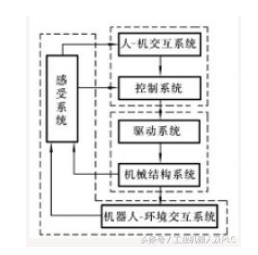
如图所示, 工业机器人系统由三大部分六个子系统组成。三大部分是: 机械部分、传感部分、控制部分。六个子系统是: 驱动系统、机械结构系统、感受系统、机器人-环境交互系统、人-机交互系统、控制系统。下面将分述六个子系统。
工业机器人的基本组成
工业机器人三大构件
1. 驱动系统
要使机器人运行 起来, 就需 给各个关节即每 个运动自由度安 置传动 装置, 这就是 驱动系统。驱动系统可以是液压传动、气动传动、电动传动, 或者把它们结合起来应用的综合系统; 可以直接驱动或者通过同步带、链条、轮系、谐波齿轮等机械传动机构进行间接驱动。
2. 机械结构系统
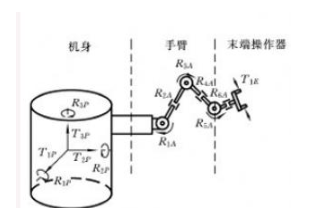
工业机器人的机械结构系统由机身、手臂、末端操作器三大件组成, 如图所示。每一大 件都有若干自由度, 构成一个多自由度的机械系统。若机身具备行走机构便构成行走机器人;若机身不具备行走及腰转机构, 则构成单机器人臂( Singl e R obot Arm) 。手臂一般由上臂、下臂和手腕组成。末端操作器是直接装在手腕上的一个重要部件, 它可以是二手指或多手指的手爪, 也可以是喷漆枪、焊具等作业工具。
3. 感受系统
它由内部传感器 模块和外部传 感器模 块组成, 获取内部和外部环 境状 态中有意义的信息。智能传感器的使用提高了机器人的机动性、适应性和智能化的水准。人类的感受系统对感知外部世界信息是极其灵巧的。然而, 对于一些特殊的信息, 传感器比人类的感受系统更有效。
4. 机器人-环境交互系统
工业机器人环境 交互系 统是实现工业机 器人与外部环境中的设备相互联系和协 调的系统。工业机器人与外部设备集成为一个功能单元, 如加工制造单元、焊接单元、装配单元等。当然, 也可以是多台机器人, 多台机床或设备, 多个零件存储装置等集成一个去执行复杂任务的功能单元。
5. 人-机交互系统
人-机交互系统是使操作人员参与机器人控制与机器人进行联系的装置。例如, 计算机的标准终端, 指令控制台, 信息显示板, 危险信号报警器等。归纳起来为两大类: 指令给定装置和信息显示装置。
6. 控制系统
控制系统的任务是根据机器人的作业指令程序以及从传感器反馈回来的信号支配机器人的执行机构去完成规定的运动和功能。假如工业机器人不具备信息反馈特征, 则为开环控制系统; 若具备信息反馈特征, 则为闭环控制系统。根据控制原理可分为程序控制系统, 适应性控制系统和人工智能控制系统。根据控制运动的形式可分为点位控制和轨迹控制。
二、工业机器人技术参数
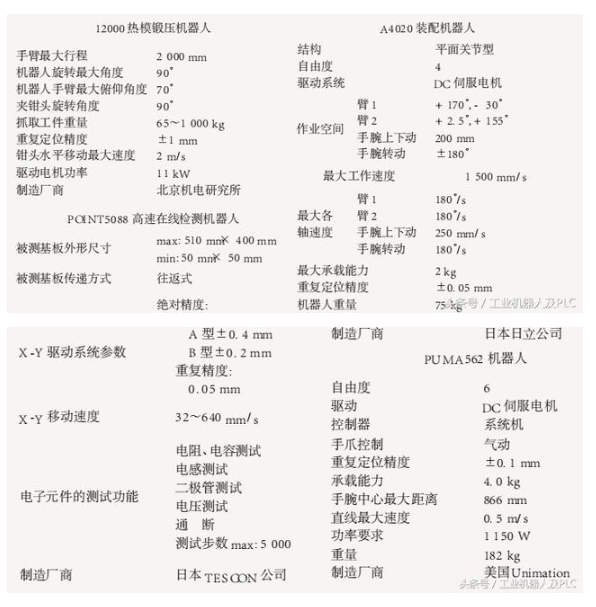
技术参数 是各工 业机器人 制造商在产品供 货时所提供的技术数据, 表 1-1 提供的 几种工业机器人的主要技术参数是从国内外工业机器人产品样本中摘录出来的, 仅供参考。尽管各厂商所提 供的技 术参数项目是不 完全一样的, 工业机 器人的 结构、用途等 有所不同, 且用户的要求也不同, 但是, 工业机器人 的主要技术参数一般都应有: 自由度、重复定位精度、工作范围、最大工作速度、承载能力等。
1. 自由度
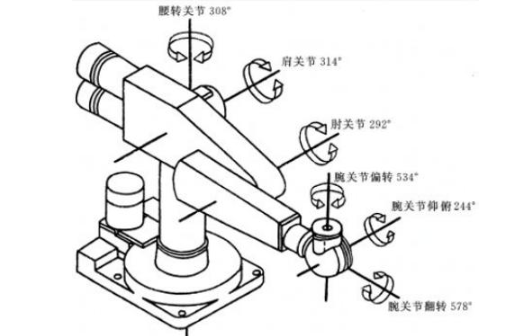
自由度是 指机器人所具有 的独立坐标轴运 动的数目, 不应包括手爪( 末端操作器) 的开合自由度。在三维空间中描述一个物体的位置和姿态( 简称位姿) 需要 6 个自由度。但是, 工业机器人的自由度是根据其用途而设计的, 可能小于 6 个自由度, 也可能大于 6 个自由度。例如,A 4020 装配机器人具有 4 个自由度, 可以在印刷电路板上接插电子器件; PUMA 562 机器人具 有 6 个自由度, 如图 所示, 可以进行复杂空间曲面的弧焊作业。从运动学的观点看, 在完成某一特定作业时具有多余自由度的 机器人, 就叫做冗余自由度 机器人, 亦可简称冗余 度机器人。例如, PUMA562 机器人去执 行印刷电 路板上 接插电子 器件的 作业时就 成为冗余 度机器人。利用冗余的自由度可以增加机器人的灵活性, 躲避障碍物和改善动力性能。人的手臂( 大臂、小臂、手腕) 共有 7 个自 由度, 所以工作起来很灵巧, 手部可回避障碍物从不同方向到达同一个目的点。
PUMA562机器人
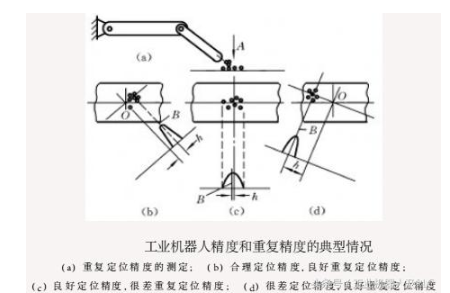
2. 重复定位精度
工业机器人精度是指定位精度和重复定位精度。定位精度是指机器人手部实际到达位置与目标位置之间的差异。重复定位精度是指机器人重复定位其手部于同一目标位置的能力, 可以用标准偏差这个统计量来表示, 它是衡量一列误差值的密集度, 即重复度, 如图所示。
3. 工作范围
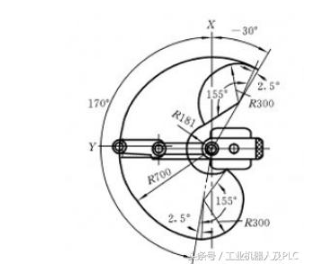
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合, 也叫做工作区域。因为末端操作器的形状和尺寸是多种多样的, 为了真实反映机器人的特征参数, 所以是指不安装末端操作器时的工作区域。工作范围的形状和大小是十分重要的, 机器人在执行某作业时可能会因为存在手部不能到达的作业死区( dead zone) 而不能完成任务。图1-6 和图1-7 所示分别为P UMA 机器人和 A 4020 机器人的工作范围。
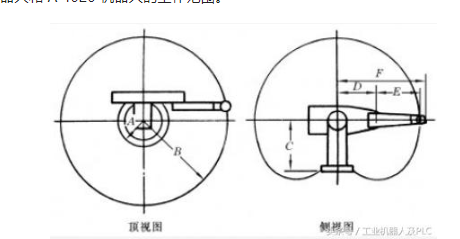
PUMA机器人工作范围
4. 最大工作速度
最大工作速度, 有的厂家指工业机器人主要自由度上最大的稳定 速度, 有的 厂家指手臂末端最大的合成速度, 通常都在技术参数中加以说明。很明显, 工作速度愈高, 工作效率愈高。但是, 工作速度愈高就要花费更多的时间去升速或 降速, 或者 对工业机器人的最大加速度率或最大减速度率的要求更高。
A4020装配机器人工作范围
5. 承载能力
承载能力是指机 器人在工作范 围内的 任何位 置上所能承受的 最大质 量。承载 能力不 仅决定于负载 的质量, 而且还与机器人运行 的速度和加速度的大小和方向有关。为了安全起见, 承载 能力这一技术指标是指高速运行时的承载能力。通常, 承载能力不仅指负载, 而且还包括了机器人末端操作器的质量。
-
工业机器人的特点2025-07-26 4530
-
PDF——工业机器人技术及应用2022-10-16 27515
-
关于工业机器人的知识汇总2021-10-11 4019
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 5452
-
工业机器人与视觉实训平台介绍2021-07-01 1930
-
工业机器人的主要技术有哪些详细介绍2020-10-06 13159
-
工业机器人的基础资料概述2020-06-04 1958
-
工业机器人的分类2018-12-24 42115
-
工业机器人的技术原理2018-11-23 5098
-
零基础玩转工业机器人2018-10-29 5030
-
工业机器人应用广泛2017-09-07 3766
-
《工业机器人》,蒋刚编著的,附下载。2016-06-01 40226
-
工业机器人经典好书籍——《工业机器人》2015-02-03 32512
-
工业机器人的基本结构2015-01-19 9559
全部0条评论

快来发表一下你的评论吧 !
