

基于LabWindows/CVI平台和开发板实现多点随机振动试验系统的设计
测量仪表
描述
介绍
多点激励振动试验控制技术是对大型复杂试件开展可靠性和环境试验的关键技术,对产品可靠性的考核有着重要的意义。本文将给出多点随机振动试验的控制方案和控制系统的设计方案,在LabWindows/CVI平台上结合NI PCI-4551和NI PCI-4472板卡开发一个双振动台随机振动控制系统,并进行了实际连台试验。试验结果表明:在一定试验条件下,本文给出的控制方案是可行的,且所设计的控制系统具有较好的控制结果,达到了试验规范要求。
引言
随着对产品设备安全性、可靠性和环境适应性要求的不断提高,推动了考核产品耐振动应力的振动试验技术的发展,同时被试产品覆盖面也进一步扩宽,从元器件到部件、组合件乃至整机都要求进行振动试验,以便在更高层次上充分暴露大系统可能存在的薄弱环节和设计缺陷。
随着被试产品结构复杂化,体积大型化及产品重型化,单点激励振动试验已不能提供足够的推力或是达到特定的运动水平来较真实地模拟产品实际工作环境,并达到规定的试验要求。而国军标、美军标及其它许多国际标准对振动试验中的被试产品所施加应力都有严格要求,应使其尽量符合实际的产品工作环境,因此,对于无法用单点激励来形成的振动环境,则需要通过多点激励振动来解决。而目前在国内,多点激励振动控制技术还处于起步阶段,多点振动控制系统更是没有研制出来。本文将介绍多点随机振动试验控制技术和基于虚拟仪器技术的控制系统的设计开发,并对实际连台试验结果进行分析讨论,希望能够为多点激励振动控制技术的进一步研究奠定一个良好的基础。
系统设计
1、 系统组成
系统由控制计算机、NI PCI-4551、NI PCI-4472、BNC-2140、功率放大器、电荷放大器、传感器、激振器、试件、夹具及连接电缆等组成(见图1)。系统使用仪器设备见表1。其基本工作原理为:控制计算机生成驱动信号由PCI-4551卡输出经功率放大器放大后给激振器来产生随机振动,同时由安装在试件(或夹具)上的加速度传感器拾振,经电荷放大器后通过PCI-4472采集输入到控制计算机,从而形成闭环控制。在实际试验过程中,由于外界干扰或系统特性的影响,控制过程应反复进行,以使控制点处的振动能够达到并保持试验规范要求。
图1 系统组成框图
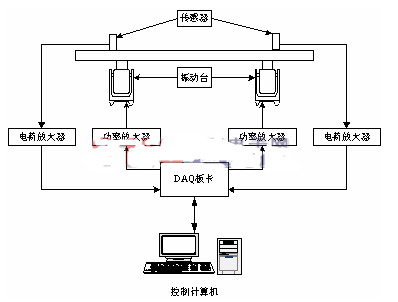
表1 系统仪器设备使用列表

2、 控制方案
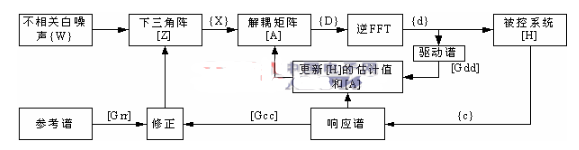
随机振动试验目的是要求控制点的响应谱与参考谱在误差容许范围内保持一致。多点激励随机振动控制方案如图2所示。控制方案的第一步是由参考谱密度阵 来得到下三角阵[Z]的初始值;第二步估计被控系统的频响特性矩阵[H],对被控系统进行解耦得到解耦矩阵[A],即控制器;第三步是利用[Z]的初始值,系统的解耦矩阵[A]及独立(不相关)白噪声频谱向量{W}开始试验。闭环控制的基本原理是白噪声源{W}通过下三角阵[Z]得到{X},然后经过解耦矩阵[A]得到驱动信号频谱向量{D},对其进行逆FFT变换得到时域驱动信号{d},用驱动信号激励被控系统得到时域响应信号{c},计算响应谱密度阵 ,利用 和 来修正下三角阵[Z]从而实现闭环控制。在进行闭环控制时,如果驱动谱密度矩阵是非奇异的,则可以利用驱动谱密度矩阵 和响应谱密度矩阵 来修正被控系统的频响特性矩阵[H]和解耦矩阵[A]。如果驱动谱密度阵是奇异的,则无法修正,不过可以根据控制误差大小来对解耦矩阵进行逐步部分修正。
3、 控制软件设计
控制软件是整个控制系统的核心部分。其是在LabWindows/CVI平台上结合NI-DAQ及NI-4551和NI-4472卡开发的。LabWindows/CVI提供了控制软件开发所需的几个很关键的库——用于驱动数据采集卡完成数据输入输出的DAQ库和进行信号处理的高级分析库,且编程简单快捷,因此采用LabWindows/CVI作为本控制系统的软件开发平台给整个控制软件的实现过程带来很大的方便。
控制软件主要由参数数据的输入和确认,随机振动试验的运行控制和试验信息及结果的显示、存储和打印输出等部分组成。试验运行控制部分包括系统自检、系统传递函数估计、闭环控制和开环试验部分。
本控制软件的关键是闭环控制模块的设计。闭环控制要考虑控制的实时性,驱动信号发送的连续性、同步性和响应信号采集的同步性。同步性由于采集卡本身特性基本能够满足,连续性可以通过双缓冲发送技术得到解决,对于闭环控制的实时性问题,解决办法是采用多线程技术,为了确保驱动信号的连续发送,则为其开辟一个线程,并设为主线程,配合双缓冲技术可以达到连续发送;为响应信号采集和处理及结果实时显示开辟两个线程。真随机试验闭环控制流程见图3。
从用户角度考虑,友好的人机界面是最重要的。控制软件需要显示的数据有试验信息、参考谱、控制谱、驱动谱、互谱相位及系统传递函数矩阵等。由于其中包括文本和图形显示方式,所以为了便于用户查看,采用多文档界面(MDI)。主界面如图4所示,其他参数设置界面及自检界面等采用对话框形式,由于参数设置界面太多,只给出参考谱参数设置界面(见图5)和公共参数设置界面(见图6)。
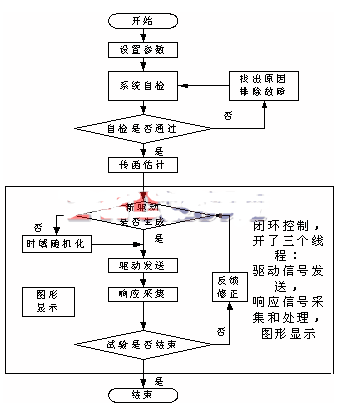
图 3 闭环控制流程图
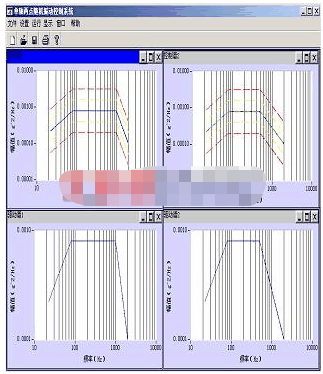
4 控制软件主界面
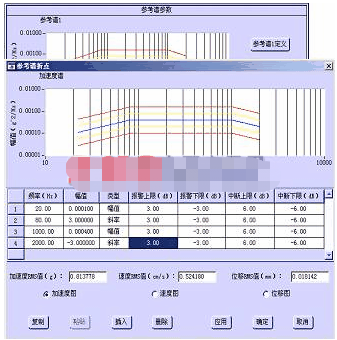
图5 参考谱参数设置界面
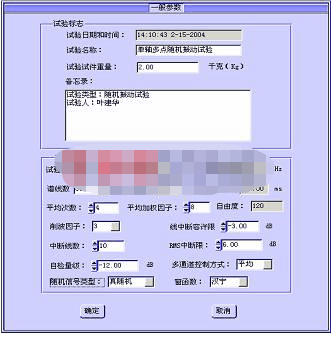
图6 公共参数设置界面
结果分析
根据上文的控制方案设计了一个两点随机振动控制系统,并进行了实际连台试验,验证控制算法是否可行,并对结果进行了分析讨论。
1、开环试验结果及分析
开环试验不进行反馈修正。其试验结果可以用来考察解耦控制环节的设计好坏。图7所示的就是开环试验结果。从图中可以看出:被控系统的共振点处和反共振点处的试验结果较差。这说明被控系统在共振点处,很小的驱动都会产生很大的响应,而且在该处同频率的干扰或噪声会被放大,从而不好控制;对于反共振点来说,为了能够在这些频率点上达到试验要求,则驱动信号在对应的频率点上的能量较大。即使对本控制点不会产生太大的响应,也可能通过系统的耦合性使其他控制点在对应的频率点上产生很大的响应。
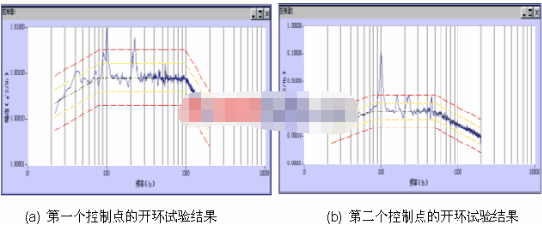
通过以上分析可以看出:对于实际系统,由于存在各种干扰或噪声,以及系统频响特性估计存在误差,所以只通过设计开环控制器(解耦矩阵)是很难达到试验规范要求的。因此,必须在开环试验的基础上加上反馈修正环节形成闭环控制,以此来不断修正控制偏差,从而达到试验要求。
2、闭环控制试验结果及分析
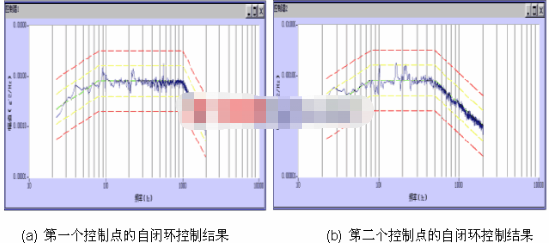
图8所示的是闭环控制试验结果。对比开环试验结果可以明显地看出:在开环试验中超差频段上的控制谱基本被修正到报警限范围内了。
通过对上述两点激励随机振动试验结果的分析可知,本文研究的控制方案是可行的,在一定的条件下可以得到较好的控制结果。
结论
由于LabWindows/CVI具有DAQ库和高级信号分析库等函数库,再结合NI-4551和NI-4472卡的优良性能,使得本人在设计开发时,把主要精力放在了控制方案和反馈修正算法的研究上,从而一旦确定了控制方案和算法就能很快设计出控制系统,然后进行实际的连台调试,验证控制算法的可行性,并发现问题改进算法,最终得到了较好的控制效果,满足了试验规范要求。因此,
虚拟仪器技术使得仪器设备的设计开发具有很强的灵活性和扩展性,而且缩短了开发周期和节省了开发费用。
责任编辑:gt
-
随机振动试验原理及标准规范2023-10-27 2792
-
如何利用LabWindows/CVI平台开发虚拟函数信号发生器2021-04-25 1677
-
Labwindows CVI的简介说明2020-03-17 3489
-
基于LabWindows/CVI开发平台实现Namisoft频谱仪程控软件设计方案2019-11-28 3773
-
随机振动的概念及试验条件有哪些2019-05-30 21126
-
NI宣布推出ANSI C开发环境LabWindows/CVI2010-01-16 1317
-
DSP BIOS在随机振动控制系统中的应用2009-12-04 562
-
LabWindows/CVI与PLC的MPI通信研究2009-08-29 990
-
LabWindows/CVI基础教程2009-07-23 2038
-
基于LabWindows/CVI 的发动机试验数据库的设计与实现2009-06-25 876
-
一种LabWindows/CVI与MATLAB混合编程的实现2009-06-24 940
-
基于嵌入式操作系统COS-II的随机振动控制主从2009-05-08 591
-
DSP/BIOS在随机振动控制系统中的应用2009-01-11 593
-
基于虚拟仪器的多点随机振动试验控制系统的设计2006-03-24 720
全部0条评论

快来发表一下你的评论吧 !
