

基于DSP芯片实现压实度测量的改进系统软硬件设计
测量仪表
描述
引言
上世纪80年代后期,国内开始压实度计方面的研究,也曾开发出机载式压实度仪,由于采用数码管显示,没有采用先进的计算机技术,尽管成本低,但在实际应用中效果并不理想。仪器的实时性不强,显示值和实际测量值不能很好地对应。
在国内外现有检测方法的基础上,本文对现有的压实度测量系统进行了改进。采用了先进的DSP芯片作为主控制器,充分利用DSP的高速运算能力,达到了对被压实路面压实度的实时、准确测量。
工作原理
现代压路机按压实原理可分为静力式压路机、振动式压路机和冲击式压路机。其中,振动压路机是目前国内使用最广泛的一种压实机械,其主要由发动机、传动系统、操作系统、行走装置和机架构成。振动轮是从动轮,也是压实轮,其采用的是一种不平衡偏心块式结构。当振动压路机在作业时,振动轮带动偏心块高速旋转,偏心块产生的离心力就成为干扰力。振动轮将此干扰力传递到土壤,使路基产生振动,在振动轮自身重力和冲击力的作用下,路基土壤颗粒间的摩擦力和粘结力被克服,小的颗粒填充到大颗粒土的空隙中,路基的压实度增加。
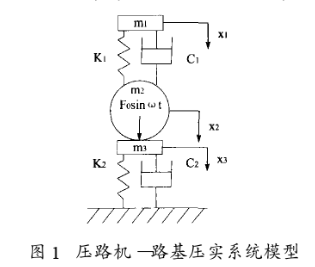
振动压路机模型如图1所示。在由振动压路机—路基组成的压实系统中,振动轮的动力学参数的变化和路面的刚度密切相关,而路面的刚度与压实度正相关,因此,振动轮的动力学参数变化和压实度密切相关。通过对振动轮的动力学参数的分析,可以反映路面压实度变化。
压实初期,路基填料比较疏松,压实度低,路基的弹性刚度小,因而阻尼大,振动轮的响应小。随着压实次数增加,路基的刚度增大,阻尼变小,振动轮的响应变大。
当路面的压实度增大到一定程度后,由于偏心块系统的不平衡性及非线性,振动压路机能够产生跳振,因而产生特殊的次谐波分量。而且压实度越高,次谐波分量成分也越高。通过对基波与二次谐波的比值与压实度进行标定,可以实现对压实度的准确测量。
硬件系统设计
集成系统硬件设计的基本原则是:安全可靠:硬件设备要满足使用环境的温度、湿度、振动、粉尘等要求。有足够的抗干扰能力:硬件系统有完善的抗干扰措施,是保证系统精度、工作正常的必要条件。经济合理:计算机和外部设备在满足测试系统的速度、存储容量、兼容性、可靠性的基础上,合理选用和设计系统硬件。
针对本系统中涉及的采样参数较多、运算量大、实时性要求高等特点,用普通的单片机难以达到系统设计要求。因此本系统采用了德州仪器(TI)公司的TMS320LF2407A(以下简称LF2407A)处理器作为主控芯片。
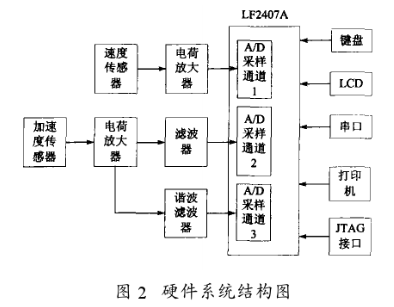
硬件系统基本结构如图2所示,加速度传感器安装在振动压路机压实轮的轴承上,用来采集振动轮在垂直方向的加速度信号,此信号包含来自轴承、激振马达等的干扰波。经电荷放大器放大后,分为两路。一路经滤波器滤波,去掉干扰波信号后,送入A/D采样通道2;另一路经谐波滤波器,送入A/D采样通道3,此处谐波滤波器的作用是仅使振动产生的一次谐波通过。在LF2407A内部对两路信号首先进行A/D转换,然后再对数字信号分别进行快速傅立叶变换,最终得到一个与路基压实度成比例的值,通过对该值和压实度值进行标定,可以用来准确表示压实度值变化。
速度传感器安装在车轮上,采集来的信号输入A/D采样通道1,用来计算振动压路机的行驶速度和里程。
键盘用于输入用户指令,是系统中很关键的部件,通过键盘按键响应与液晶菜单选择,实现检测里程设置、压路机参数设置、振动频率显示、保存、打印等功能。
软件系统设计
软件是实现集成系统各种功能的关键。软件设计的基本原则是:
①结构合理。程序采用结构模块化设计。这不仅有利于程序的进一步扩充,而且有利于程序的修改和维护。
②操作性能好。在软件系统设计时,要考虑尽可能降低对操作人员专业知识的要求,做到系统界面简洁、操作方便。
③具有一定的自诊断功能。系统设计相应的检测程序,以便在发生故障时,便于查找故障部位。
LF2407A支持汇编语言和C语言编程。使用C语言编程时,其代码的优化率可以达到90%。而且在编程过程中可以嵌入汇编语言,因此编程灵活、方便。
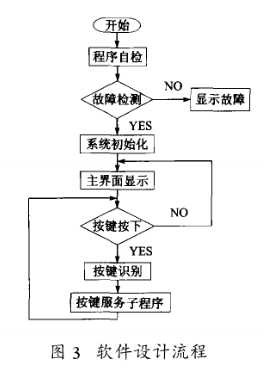
软件设计流程如图3所示。其中,按键服务子程序又包括:检测里程设置、压路机参数设置、土类设置、连续动态检测设置、保存、打印、退出等。
结语
本文论述的系统在结合现有检测技术的基础上,采用先进的DSP,驾驶员可以从显示器上随时查看压实情况、振动频率、运行速度,能够实现压实质量的实时控制,精度高、实时性强。
责任编辑:gt
-
支持过程级动态软硬件划分的RSoC设计与实现2010-05-28 2014
-
嵌入式主动视觉系统怎么实现软硬件设计?2019-08-26 2302
-
怎么实现动感系统的总体构想及其软硬件设计?2021-05-12 1286
-
怎么实现基于DSP的车载式压实度实时检测系统设计?2021-05-17 1276
-
怎么实现基于C6000系列DSP的MPEG-4视频编码卡的软硬件设计?2021-06-02 1211
-
ARM嵌入式最小系统的软硬件架构的改进研究2021-07-16 1795
-
基于时差测距的超声波测距系统的软硬件设计2021-07-20 1856
-
如何去实现RCC系统时钟的软硬件设计呢2021-11-10 1391
-
基于DSP的电源控制系统的软硬件开发2009-07-30 731
-
基于DSP的OLED显示器软硬件设计及实现2011-04-17 1579
-
基于FPGA的软硬件协同测试设计影响因素分析与设计实现2017-11-18 2497
-
基于DSP的压路机路面压实度检测系统设计方案解析2017-11-26 1768
-
车载压实度检测仪的软硬件系统设计与应用2020-07-24 1475
-
基于FPGA芯片的软硬件平台的使用2021-07-01 2411
-
软硬件协同设计是系统芯片的基础设计方法学2022-08-12 4812
全部0条评论

快来发表一下你的评论吧 !
