

浅析移动机器人的SLAM技术
机器人
描述
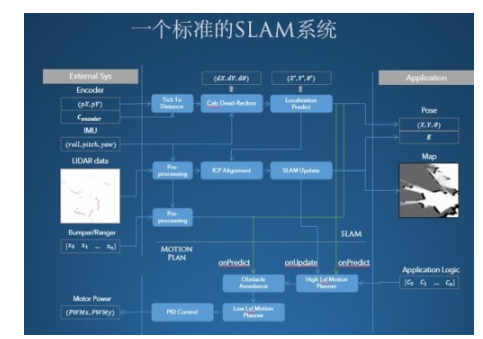
自主导航是移动机器人自动运行的一种关键技术,目前最主流的导航技术是SLAM(simultaneous localization and mapping)的方式,中文意思是”即时定位与地图构建“,其原理是通过传感器对周围环境进行扫描,然后构建一个和真实环境一致的地图,同时对机器人位置进行定位,并规划一条正确的路径,最终引导机器人安全到达指定的目的地。
目前,市面上大部分的移动机器人厂商都采用SLAM这种导航方式,相关技术和部件产品也已经成熟。SLAM的方式摆了此前移动机器人对外部环境的依赖,例如必须要安装导轨、磁条、二维码等辅助设备,这种方式约束了机器人的活动范围,也不利于生产线的临时调整。
SLAM的方式主要有两种,一种是基于激光LiDAR传感器的方式,激光LiDAR传感器快速扫描周转环境,然后生产地图进行导航。另一种是视觉导航,利用摄像头,对周边的图像进行采集,利用算法生成地图和运行路径。目前,两种方式各有优劣,也有厂家采用多种传感器的方式,实现更高级标准的导航。
视觉导航Visual SLAM
Visual SLAM即(vSLAM)是一种基于计算机视觉的技术,主要用于室内定位导航。原理是通过视觉摄像机拍摄周围的图像,然后计算出周围环境的位置和方向,也就是对未知环境进行地图构建,然后就可以帮助移动机器人导航。
视觉导航的优点是:摄像头相对比较便宜,不需要承担大量的成本。此外,通过图像可以分辨出周边物体的纹理,从而识别出人、动物或者其他物体对象。
不过,视觉在运算的过程需要大量的硬件资源,图像占的储存空间大,运算起来比较复杂,开发难度也比较大。此外,视觉传感器容易受到光线的影响而产错误的影像,例如在较暗的环境下不容易识别环境。不过从成本来看,视觉的方式相对激光雷达的要低。
激光导航LiDAR SLAM
LiDAR SLAM的方式是通过多个激光传感收发器照亮物体,从而测量到物体的距离,例如墙壁或椅子等。每个收发器快速发射脉冲光,并测量反射的脉冲以确定障碍的位置和距离。
光的传播速度很快,所以需要高性能的激光传感器才能成功测出目标的精确距离,因此,LiDAR成为一种快速而准确的方法。不过,如果使用2D LiDAR时,可能因为物体遮挡而信息丢失。虽然3D激光传感器能够解决这些问题,但成本十分昂贵。
总的来说,LiDAR更快,更准确,但成本也更高。而vSLAM更具成本效益,可以使用价格便宜的摄像头,并具有3D地图的潜力,但运行速度比激光要慢,精确上也不及激光。
无论视觉SLAM还是LiDAR SLAM,用户都需要为SLAM系统配置可靠的运算平台,以实现最佳性能。未来基于多传感器的方式将会更适应于移动机器人,例如加上红外、超声等传感器技术,可以进一步确保机器人在不同环境下能准确测量和计算出障碍物的距离。
那么问题来了,商用自主移动机器人和工业移动机器人到底差在哪里,为什么价格会相差这么大?
其实道理也很简单,一部IPHONE手机和一部千元机的基础功能在都相差无几,但是价格差异十分悬殊。究其根本,是产品质量和研发技术上的差距。抛开具体功能不谈,商用移动机器人和工业移动机器人在定位精度和运行稳定度及运行频次、时长上的要求大有不同,这也就决定了两类机器人在硬件属性、软件功能及算法运用的差异和不同。
商用移动机器人
商用机器人就拿咱们最常见的扫地机器人来说,目前市面上的扫地机器人多采用视觉SLAM的导航方式。扫地机器人系统通常由四个部分组成:移动机构、感知系统、控制系统和吸尘系统。移动机构是扫地机器人的主体,决定了机器人的运动空间,一般采用轮式机构。
感知系统一般采用超声波测距仪、接触和接近觉传感器、红外线传感器和CCD摄像机等。可以看到,以上用与感知的设备成本想必工业移动机器人的激光雷达及配备的感知器、摄像机而言,成本相差数十倍。但是满足扫地需求还是没有问题的。主要保证机器人能够在平面内移动。壳体前端和侧面装有红外开关,作为碰撞检测传感器。底面的3个红外开关作为台阶检测传感器,防止跌落。驱动轮上装有光电编码盘,可以对轮速进行检测和控制,实现定位和路径规划。同时还扩展了超声波传感器,用于精确定位的需要;
随着近年来计算机技术、人工智能技术、传感技术以及移动机器人技术的迅速发展,扫地机器人控制系统的研究和开发已具备了坚实的基础和良好的发展前景。扫地机器人的控制与工作环境往往是不确定的或多变的,因此必须兼顾安全可靠性、抗干扰性以及清洁度。用传感器探测环境、分析信号,以及通过适当的建模方法来理解环境,具有特别重要的意义。近年来对智能机器人的研究表明,对于工作在复杂非结构环境中的自主式移动机器人,要进一步提高其自动化程度,主要依靠模式识别及障碍物识别、实时数据传输及适当人工智能方法,还需要进一步开发全局模型,从而为机器人获取全局信息。
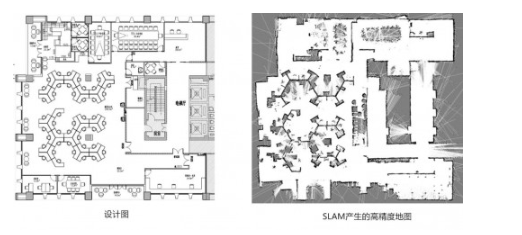
当然,在一些高精度要求的商业服务复杂场景,激光SLAM技术也有实战的空间,价格也会跟着昂贵起来。它们已在餐厅、商场、酒店、银行、医院等各大服务场所中“崭露头角”,尤其在本次疫情抗击中,激光SLAM自主移动机器人更是站上了“风口浪尖”。一时间医护助理机器人、清洁消毒机器人、运输配送等机器人出现在各个领域的前线,减少了人与人之间的近距离接触,最大程度的保证了相关人员的安全。精细化构图技术,可构建高精度、厘米级甚至毫米级(毫米级一般是工业标准)的地图,具备超高分辨率,且不存在累加误差。构建的地图规则、精细,可直接使用,无需二次优化修饰,能直接满足使用预期。在复杂多变,环境不受控制的应用场所(如医院、商场、写字楼等人流量大场所)行走时,可实时动态识别环境中的人或者移动障碍物,并进行灵活规避和路线规划。
工业移动机器人
在工业领域,移动机器人已经成为一种验证工厂自动化的标准和潮流。抛开SLAM技术不谈,磁条和二维码技术在工业和仓储领域的使用由来已久,行业也积累了相当丰富的经验。但随着自动化水平的提高,工厂生产对产线的要求也趋于多样化、多频次、小周期。因此,产线灵活柔性的要求应运而生,SLAM技术刚好便可以解决这一需求。但是视觉SLAM在图像处理中,边缘锐化、特征提取等图像处理方法计算量大,实时性差,对处理机要求高。另外,视觉测距法检测不到玻璃等透明障碍物的存在,另外受视场光线强弱、烟雾的影响大。因此不作为主流使用,一般都是视觉传感作为辅助搭配激光SALM进行工作。
不管是 Sick,倍加福,还是 Velodyne,价格从几万到几十万不等,成本相对来说比较高,但目前国内也有低成本激光雷达(RPLIDAR)解决方案。VSLAM 主要是通过摄像头来采集数据信息,跟激光雷达一对比,摄像头的成本显然要低很多。但激光雷达能更高精度的测出障碍点的角度和距离,方便定位导航。
除配备激光雷达外,还需要机器人具有IMU(惯性测量单元)、里程计来为激光雷达提供辅助数据,否则SLAM系统也难以得到运行。总的来说,SLAM算法本身是一个对于外部系统有着多种依赖的算法,这是一个切实的工程问题。我们知道很多机器人,比如扫地机是不可能装一个PC进去的。为了让SLAM能在这类设备里运行,除了解决激光雷达成本外,还要对SLAM算法做出很好的优化。目前斯坦德机器人已经完美实现了各环节的自主研发和项目落地验证,在业内激光SLAM技术上领跑各行。
斯坦德机器人作为专注于工业级移动机器人研发与生产的高新技术企业,实现了从机器人激光SLAM底层定位算法、操作系统、控制器等核心元素的自主研发全覆盖,主要产品为激光SLAM导航AGV及其调度系统。致力于为优秀的系统集成商及终端制造工厂寻找标准化、可复制的算法应用场景,实现其柔性化、敏捷化的厂内物流需求,为客户践行轻资产、回报快的初期物流投入,为行业构建信息化、数据化的物流基础设施,是全球真正践行把激光导航AGV应用于华为、中兴、富士康等实际工业物流领域的高科技企业。
-
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现2023-06-28 2213
-
基于SLAM的移动机器人设计2021-11-08 3278
-
差速移动机器人轨迹跟踪控制方法2021-09-01 1939
-
什么是移动机器人软硬件系统问题2021-08-06 2538
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 3007
-
如何实现移动机器人的设计?2020-11-23 3335
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 3826
-
为什么自主移动机器人无法绕开SLAM?2019-12-13 3260
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4155
-
移动机器人的分类与移动机器人技术研究现状和未来发展的分析2017-09-16 1677
-
Labview My RIO 移动机器人2016-08-21 13679
-
资料:移动机器人能否自动充电?2016-01-20 5193
-
移动机器人常用传感器2012-08-20 6967
-
基于Matlab和VR技术的移动机器人建模及仿真2010-11-18 3066
全部0条评论

快来发表一下你的评论吧 !
