

使用无人机如何在茂密森林区快速获取测图数据,有什么方法
军用/航空电子
描述
引言
传统的航空摄影测量,受空域申请、航摄周期等影响,在快速响应和小区域的精准测绘中无法满足快速更新的需求,低空无人机航测具有机动灵活、高效快速、作业成本低、生产周期短等优点,迅速成为了传统航测的有力补充。本文进行了基于无人机航测数据的1∶2000DLG数据快速生产实践,并对成果数据进行了精度检验,最后对实践中存在的问题提出了自己的思考。本文为偏远的茂密森林区快速获取测图数据提供了方法,也能够为无人机航测在其他领域的应用提供参考。
无人机航测外业和内业数据处理流程
1.1 无人机航测外业
(1)基本流程
无人机航测外业流程为:收集测区资料,对测区所处地理位置、地形地貌等进行评估,考虑周围是否有机场、军区等,是否需要报备和空域申请等;然后根据成果要求(如成果比例尺、地面分辨率大小等)和已有无人机航测设备,确定是否可以飞行;确定可以飞行后,在地面站软件进行航线规划,设置飞行高度、重叠度、起降场等,形成飞行计划,必要时可进行现场踏勘;进行像控点布设、采集,根据测区地形地貌,也可在飞行任务完成后进行像控点采集;将飞行计划上传至飞行控制系统,进行起飞、飞行、降落,采集影像数据、记录飞行的POS(Position Orientation System,简称POS)数据、获取飞行数据;地面监测系统显示无人机飞行航迹,地面工作人员据此监视无人机工作情况;飞行任务完成后,下载航测数据。基本流程如图1.

图1 无人机航测外业基本流程图
(2)航线规划
根据地面分辨率大小、相机CCD 大小、焦距,确定飞行航高;根据地形复杂程度,如高差大小,确定航向重叠度、旁向重叠度的大小,航向重叠度一般设置在80%以上,旁向重叠度设置在60%以上;根据飞机续航时间,划分飞行架次。
(3)像控点布设与测量
像控点布设一般采用区域网布点方案,布点个数根据测区地形调整。测量方式采用RTK测量。像片控制点中的平面控制点要求选在影像清晰的细小线状地物点、明显地物拐角点,高程控制点还要求高程起伏较小,选点困难地区,可考虑实地布设控制点。为了满足大比例测图需求,一般采用实地布设控制点。
1.2 内业数据处理
航飞数据获取后,采用内业数据处理软件如pix4Dmapper、ContextCapture等进行无人机数据处理,主要流程为:导入航飞的原始影像数据、POS数据,进行影像预处理,修正影像畸变和相机检校;自动进行连接点提取和自由网平差,进行影像相对定向;加入外业控制点,进行区域网平差、纠正,进行绝对定向;生成正射影像图(DOM)、数字表面模型(DSM)、点云、实景三维模型等数据;数字高程模型(DEM)、数字线划图(DLG)则要借助立体测图软件、地理信息系统(GIS)软件以及外业调绘等进一步生产。基本流程如图2.
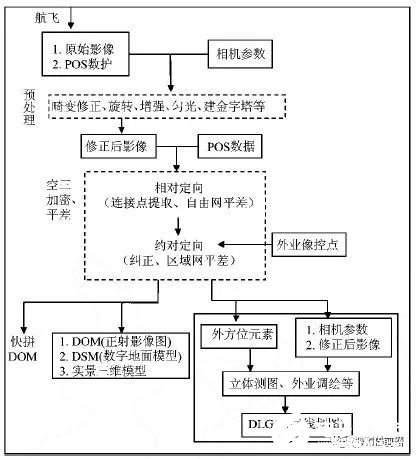
图2 无人机内业数据处理流程图
2.1 工作区地理位置
工作区位于广东省阳山县南部太平镇的牛鼻岩地区,面积约13km2.地貌上属丘陵地带,为典型的喀斯特地貌,地形上左右两边为少量的平坦耕地,其余为喀斯特峰林,山山相连,植被覆盖茂密。
2.2 无人机数据获取
采用武汉纵横天地公司SKYLAND系列无人机的DF150型号无人机平台获取数据。该款无人机为旗舰型电动固定翼无人机,具有长航时、超纤薄的特点,翼展2m,续航时间150min,作业效率高,爬升速率高,起飞方式多样化,既可以采用弹射器起飞,也可以使用弹力绳起飞,采用伞降方式降落,最大限度保护相机,遥控器手动或半自动控制实现复杂区域精准降落,抗风力强,智能化操作,配备全画幅3640万像素索尼A7R相机,满足高分辨率需求。
根据工作区范围,实际飞行两个架次。受地形影响,像控点只布设在左右两边平坦地区,共计20个,采用合众思壮RTK进行测量。
1∶2000DLG数据生产
3.1 数据处理
采用Bentley公司的ContextCapture软件进行无人机数据处理,主要流程为:影像和POS导入→自动空三处理(相对定向)→相片刺点(绝对定向)→成果输出。这里的成果为DOM、DSM以及实景三维模型。DLG的生产则要进一步借助立体测图软件获取,采用DP-Moderler测图软件进行水系、居民地、交通等地理要素的采集,地理要素采集的详细程度以满足实际需求为原则。
等高线的生成通过ArcGIS软件对DSM 去楼高、去树高后得到DEM,然后生成初始等高线,最后对初始等高线进行平滑、编辑、整理得到最终等高线,等高线的整饰按规范执行。
3.2 成果数据
工作区成果数据主要有正射影像DOM 数据、实景三维模型、数字线划图DLG 数据,图3为DOM 数据,图4为实景三维模型数据,图5为DLG数据。

图3 DOM 数据

图4 实景三维模型
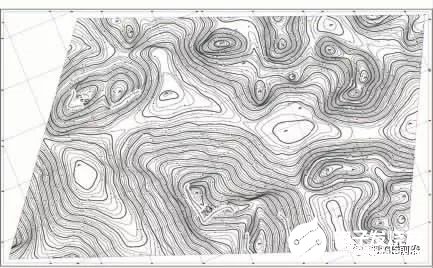
图5 DLG(局部)
3.2.1 影像分辨率
《CH/T 9008.3-2010基础地理信息数字成果1∶500、1∶1000、1∶2000数字正射影像图》规范中要求1∶2000数字正射影像图影像地面分辨率应优于0.2m。根据计算,工作区生成的DOM分辨率为0.095m,满足规范要求。
3.2.2 平面位置精度
《CH/Z 3003-2010 低空数字航空摄影测量内业规范》中要求1∶2000数字线划图(B类)、数字正射影像图(B类)的地物点对附近野外控制点的平面位置中误差平地、丘陵地不应大于2.5m,山地、高山地不应大于3.75m。随机选取50个地物点,以工作区已有的高分辨率正射影像作为真实坐标来源(该数据平面位置精度优于0.5m),点位坐标差值统计见表1.

依据《GB/T24356-2009测绘成果质量检查与验收》,按同精度检测,地物点的点位中误差计算公式为式(1):
计算结果显示DOM 数据平面位置中误差为±2.13m,满足规范要求。
3.2.3 高程精度
由于工作区除左右两边为平坦地区,其余地区植被茂密,难以通行,且GPS信号差,因此未能采集到足够数量的高程控制点,高程采用无人机POS系统自动空三解算成果,精度未检验。
结束语
本文采用无人机航测获取影像数据,然后进行数据处理,快速获取了工作区DOM、DLG和实景三维模型。经精度检验,成果数据影像分辨率、平面位置精度能满足1∶2000测图需求,而高程方面,由于工作区植被茂密、难以通行,高程采用无人机POS系统自动解算结果。通过数据生产的实践,有如下结论和探讨。
4.1 结论
(1)无人机航测优势明显
无人机航测影像获取快捷方便,无需专业航测设备,普通民用单反相机即可作为影像获取的传感器,操作手经过短期培训学习即可操控整个系统;成本相对低廉;飞行条件需求降低,不需要专门机场和跑道,可在普通公路上滑跑起降或采用弹射方式起飞和伞降方式降落;影像获取周期短、时效性强,从准备航飞到获取影像周期短,影像获取后可立即处理得到航测成果,时效性强;实践证明,成果能满足大比例尺成图要求。
(2)航测外业是数据来源,精度尤为重要,因此要做好精度控制航测外业数据精度受很多因素影响,为保证数据精度,实际飞行中要做好以下工作:摄影分区有无必要:对于高差起伏大、地物单一地区容易出现航摄漏洞,最好进行摄影分区,使分区内的高差满足航飞要求;漏洞补摄:漏洞补摄时最好采用前一次航摄飞行的数码相机,保证数据的一致性;航飞时间选择:综合考虑季节、天气、太阳高度角、阴影倍数等,选择合适的航飞时间;飞行质量控制:设置相机对焦、曝光时间,考虑飞机姿态稳定性,设置影像重叠度等,获取的影像要清晰、层次丰富、色调柔和;像控点布设:重点考虑布点方式、布点个数、采集精度等。
4.2 探讨
(1)如何更好地去除树高
DSM 数据是包含地面附着物高程信息的数据,要想得到DEM,就要去除地面附着物如建筑物、植被等的高程信息。对于植被稀疏区,可以采用点云分类的方法来解决这一问题,通过将点云进行分类得到地面点、建筑物、植被等类别,然后用地面点这一类别的点云构建DEM。而本文的工作区植被茂密,裸露点极少,通过点云分类的方法无法得到足够数量的地面点,因此不能构建DEM。本文采用减去平均树高的方法来去除树高,考虑到树高不一致,可以结合植被分类数据细化每一类的平均树高,从而得到较为准确的去除树高的DEM。
(2)无人机POS系统自动解算的高程数据精度问题
由于工作区受地形影响,未采集到足够数量的高程控制点,因此采用无人机POS系统自动解算的高程结果,这对于偏远的茂密森林植被区不失为一种快速获取高程数据的方法。随着无人机航测技术的发展,通过集成高精度的RTK、IMU系统以及改进数据处理算法,无控制点测图能满足大比例尺测绘生产的精度需求,届时将大大减少外业工作量,极大地提高无人机数据生产的时间和效益,也将更好地促进无人机航测的应用。
责任编辑:gt
-
无人机全景监测:空域管理的新革命2024-02-20 9443
-
无人机遥感技术2016-03-11 8180
-
都在谈论无人机:教你10种利用无人机赚钱的方法2017-02-17 11679
-
无人机基本知识大攻略2018-10-12 3914
-
无人机流行和快速增长背后,对无人机开发平台了解多少?2019-02-21 4993
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3833
-
什么是无人机图传系统?2019-08-09 13063
-
【疯壳·无人机教程11】开源编队无人机-串口(光流数据获取)2022-08-25 46251
-
【疯壳·无人机教程25】开源编队无人机-定高、定点、悬停2022-09-02 55731
-
新疆进行无人机森林防火监控演练,把无人机监控纳入森林防火2018-07-20 1765
-
大疆无人机如何在禁飞区起飞2018-01-15 157114
-
黑龙江森工林区启动多架小型无人机进行防火安全2019-03-17 1706
-
无人机技术在森林中的七大应用分析2020-10-25 4643
-
沃飞长空傲势森林消防无人机在行动,守护绿水青山2022-05-06 2420
-
傲势森林消防无人机解决方案,让森林大火灭于萌芽阶段2022-06-13 4330
全部0条评论

快来发表一下你的评论吧 !
