

消费级无人机的单镜头倾斜摄影测量方法
军用/航空电子
描述
随着数字测图的人工成本不断攀升和小型旋翼无人机的快速发展,基于倾斜三维模型的立体测图方法受到各个测绘单位的欢迎。采用单镜头相机进行高精度的无人机倾斜摄影测量,将在小范围大比例尺地形图修补测、城市三维建模、超高层建筑竣工测量、“多测合一”二、三维校核等领域发挥重要作用。
本文基于莆田市农村地籍与房屋调查工程,探讨了使用消费级、单镜头、低成本无人机进行倾斜摄影测量制作大比例尺地形图的相关技术,并通过改进相关作业方法,提高数字测图工作效率,保证测图精度,降低无人机倾斜摄影测量的应用门槛。
1、影像数据获取
研究区位于福建省第三大岛南日岛,全岛面积52km2.海岸线总长66.4km。岛上全年4级风以上时间达300d以上,为消费级无人机的航摄增加了较大困难;但岛内房屋错落有致,植被稀疏,为倾斜摄影测量提供了有利条件。
大疆精灵4RTK版无人机具有RTK导航定位系统、相机微秒级同步、APP航线规划等功能,具备cm级导航定位系统和高性能成像系统,配备千寻位置公司集成的千寻知寸网络RTK模块,有利于弱化姿态控制单元的重要性,减少荷载,提高定位精度。
在RTK的辅助下,采用井字形航线设计、低空飞行、高重叠率的作业方案获取影像数据。为了得到与多镜头云台一样的航测成果,单相机倾斜摄影需要更多的航带数和照片数。航线规划涉及地面分辨率、航高、航速、相机倾角、重叠度等。对于单镜头无人机,常用的飞行方案为多架次“之”字形方案,即在航向规划软件中依架次设置不同的航线角度、相机倾角,来模拟多镜头的航飞效果。也可采用“井”字形航线,即固定相机倾角不变,采用“井”字形反复飞行的多角度飞行方案,既保证同一地物能被3个以上的不同方向航拍到,又保持相机倾角的稳定。
本文采用如图1所示的“井”字形航线。由于大疆精灵4RTK的单块电池续航时间低于15min,为提高外业采集效率,一般需配备16块电池或6块电池加便携式充电站。在满负荷16架次飞行的情况下,单天可完成1km2的倾斜航摄。研究区面积为0.37km2.实际飞行8个架次,加上起降、换电池的时间损耗,在180min内完成了数据采集工作,共获取照片2836张。
图1 航线设计图
考虑到现场和设备情况,采用低空飞行(设置默认航高为低空80m),在没有高压电塔、风力发电塔或房屋较低矮、密集的区域,将航高降低到70m。顾及地表高低起伏,相对航高一般50多米,局部相对航高只有30多米。航向重叠度80%,旁向重叠度80%,云台俯仰角度-60°,地面分辨率优于2.19cm。
2、像控点布设
像控点布设是空中三角测量的基础,其测量精度、布设密度和分布直接影响成果精度。本文按实地间隔100m均匀布设像控点,像控点标志按“L”型布设,在L型标志的外角处打入水泥钉,并以红漆绘出点号,便于后期检测精度,且兼作图根控制点。
空中三角测量的精度最弱点位于测区边缘,因此要加强测区边角的控制,以改善区域四周的精度。以研究区内的东岱村为例,东岱村房屋密集区面积0.37km2.三面临海。测区内共布设了21个像控点,如图2所示。
图2 像控点布置图
每个像控点独立观测3次,在RTK固定解收敛至mm级后开始观测,每次观测历元数30个,采样间隔2s。观测成果平面坐标分量较差均小于3cm,垂直坐标分量较差小于5cm,取中数作为该点测量的最终成果。
3、空中三角测量
空中三角测量利用外业采集的影像、像控点成果、POS信息,通过建模获得所有影像的外方位元素,再通过多视影像密集匹配,自动获取高密度三维点云信息。空中三角测量步骤主要分为多视影像密集匹配及自由网空三、像控点判刺、绝对网空三解算等。多视影像密集匹配及自由网空三步骤基于同名特征点信息进行自动匹配解算,基本无需人工干预。
个别情况下,空三结果可能会出现丢片、分层等异常情况,可能是由于气象条件恶劣导致像片抖动剧烈或过曝光、RTK信号失锁、POS数据异常、植被和水系区域弱纹理等。
本文空中三角测量采用ContextCapture软件进行处理。研究区域共判刺21个像控点,密集匹配575965个连接点,连接图如图3所示。
图3 空三加密网连接点分布图
为比较不同像控点密度对空三精度的影响,将21个像控点均匀抽稀到8个,得到两种像控点密度下的空三控制点精度(表1),可以看出像控点减少,空三精度下降。

4、三维建模
三维自动建模基于高密度点云构建不规则三角网,对不规则三角网进行自动纹理映射,生成基于真实影像纹理的三维实景模型。生成的模型包含了高密度点云、不规则三角网、真实影像纹理3种信息。生成的倾斜三维模型成果的精度直接决定了最终成图的精度。因此,需要对模型的内符合精度进行检验。如图4所示,对同一个房角点在不同高度取点对比得到ΔX=0.02m,ΔY=0.01m。类似的,在测区内随机选择30栋混房的角点,分别在同一墙体角点的不同高度取两点,得到如图5所示的点位误差分布图,根据计算得到内符合精度为±0.034m,其中,Δs表示测量误差。
图4 同一房角点平面坐标差异分析

图5 三维模型内符合精度图
5、立体测图
基于倾斜三维模型进行的立体测图也称“裸眼测图”。采用人机交互的方式直接从倾斜三维模型上获取特征点坐标,更直观、更快捷。绘图者不需要长时间的专业培训,即可快速上手,因此受到了各测绘单位的欢迎。目前,常用的立体测图的软件有武汉天际航公司的DPmodeler软件系统、北京清华山维的EPS软件系统等。
为进一步节省倾斜摄影测量的成本,降低立体测图的门槛,提高立体测图效率,且充分考虑不同区域房屋构造不同的特性,开发了基于AutoCAD的立体测图插件。该插件利用WindowsAPI函数,捕获并锁定“Acute3D窗口选点”和“CASS窗口绘图”两个窗口,通过两个窗口间的信息交互来进行立体测图。即实时将Acute3D测量窗口中显示的点位坐标信息同步展绘到CASS中。利用该插件,考虑到房屋自身的直角、对称、镜像等特点,可以充分利用AutoCAD的构造线、垂线、延长线等工具进行辅助绘图。针对模型上房角点变形的问题,分别在房角点以及房角点所在的墙面取点,并兼顾房屋平行于相邻的房屋、加固坎、围墙、马路等特点,绘制构造线进行印证,交会出最理想的房角点位置。开发的插件与CASS原有的各工具按钮、快捷命令完全不冲突,使用方便。图6为自主研发的立体测图。
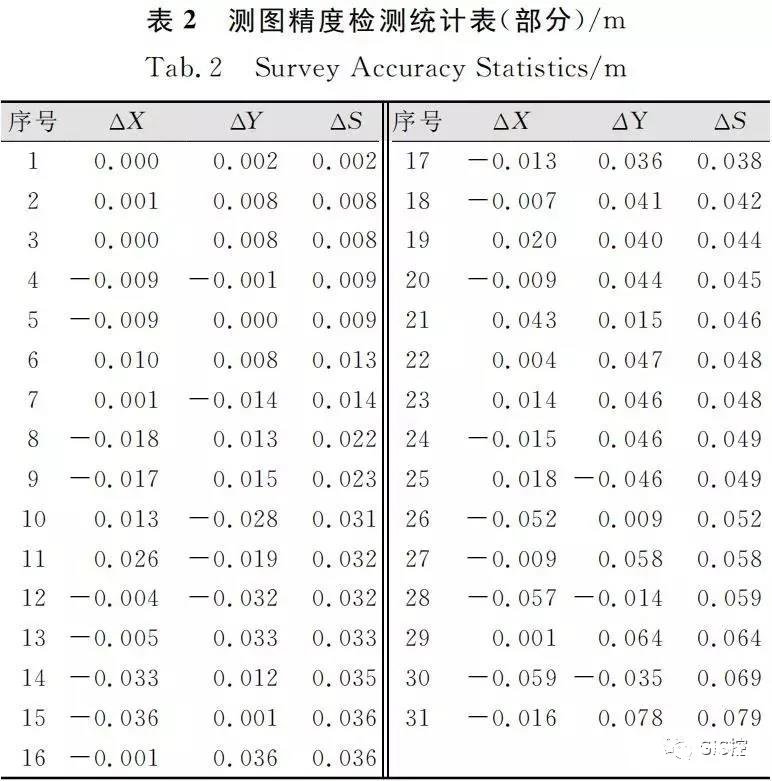
图6 自主研发的立体测图插件
6、测图精度分析
为了验证消费级无人机获取倾斜影像制作大比例尺地形图的精度,将试验区域内全站仪实测检查点坐标与立体测图成果同名点平面坐标进行比较,差值见表2.由表2可知点位精度为0.042m。
为了更加系统、全面地检验精度,在试验区选取了8个村的立体测图成果进行打点检验,如表3所示。由表3可知,采用本文方案及改进措施,能达到农村地籍与房屋调查工程的精度要求。
6、结束语
本文分析了基于大疆精灵4RTK版无人机的单镜头倾斜摄影测量方法,提出了低空飞行、井字形飞行、较高的重叠度、改进的立体测图方法等方案。以莆田市南日岛8个村为试验区域,结果证明,该方案可以满足地籍图测绘的精度要求。本文方法将测图的主要工作从原来的全站仪外业打点转变为室内立体测图,并且整套装备价格低、工作效率高、易于上手,大大缩短了测图人员的培养周期。但该方法超低空飞行受测区房屋高低影响较大,航片数量巨大,像控点密度较高,建模效率不高。
责任编辑:gt
-
无人机+倾斜摄影技术在城市三维建设中的应用优势及前景2020-09-29 3527
-
BIM与GIS结合—无人机倾斜摄影三维建模方法2020-06-19 3331
-
无人机倾斜摄影技术的原理及优势2020-06-08 24977
-
无人机倾斜摄影的4种地籍测量模式2020-06-03 1664
-
无人机倾斜摄影的五相机和双相机究竟哪个好2020-06-02 2424
-
天途航测无人机受关注,倾斜摄影技术遥遥领先2017-06-12 3862
-
无人机航拍倾斜摄影案例2017-02-15 1153
-
消费级还是工业级无人机,你更看好哪一个?2016-12-20 8780
-
消费级还是工业级无人机,未来您更看好哪一个领域发展?2016-12-15 5108
-
消费级无人机市场的真相解读!2016-09-07 4084
-
没想到无人机对摄影的影响居然是。。。。2016-06-03 3223
-
无人机数字摄影测量系统的设计和应用2009-07-11 1787
全部0条评论

快来发表一下你的评论吧 !
