

无人机惯性导航系统的特点及重要性分析
军用/航空电子
描述
飞机的运动可以描述成两类,一是质心(指物质系统上被认为质量集中于此的一个假想点)的移动,也称为线运动,相关联的导航参数有飞行速度、位置等;另一类是飞机绕质心的转动,也称为角运动,相应的导航参数有飞机的姿态角和航向角等。
惯性是所有质量体的基本属性,所有建立在惯性原理基础上的惯性导航系统,无需任何外来信息,仅靠系统本身就能在全天候条件下全球范围内和所有介质环境里自主地、隐蔽地进行三维定位和三维定向。所以,惯性导航是重要载体不可缺少的核心导航设备。
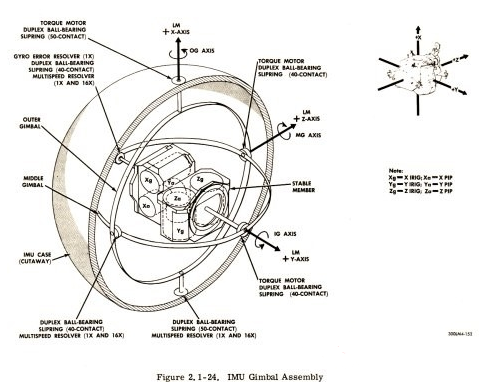
惯性元器件一般固连在重心附近位置,用来敏感飞机运动的角速度和加速度。惯导的表头一般是由加速度计和陀螺仪构成的。通常来说加速度计有三个,陀螺仪也是。因为我们世界空间是三维的,每个加速度计和陀螺仪都只能测一个方向的数据,所以需要三个。
它的需求数据是通过算法积分得出的。比如已知加速度多少,通过它的算法,可以积分出速度。已知时间,通过连续积分,可以知道每时每刻的加速度。已知加速度,可以知道速度,通过每时每刻做积分,可以推算出位置。已知角速度,通过每时每刻的积分,可以知道现在的飞行姿态。这种积分就是惯性导航的算法。
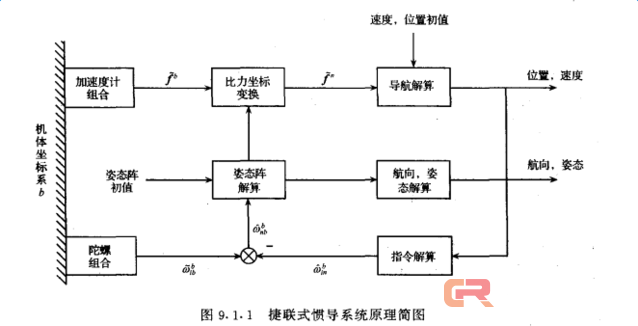
从理论上来说,在有初始运动信息的基础上,准确得到每时每刻加速度和角速度,可以准确知道飞机的精确位置和速度。但在实际应用中来说,惯性导航很容易发散,假如没有其他导航系统来给它做修正,惯导的输出与实际值容易出现大的偏差。
容易发散的原因有很多,其中最重要的是表头的测量数据是存在误差的的,误差也由多种因素产生,比如表头输出的常值偏差、白噪声是指功率谱密度在整个频域内均匀分布的噪声)、马尔科夫等,温度、湿度也会对误差产生影响,甚至因安装位置偏差都会引起杆臂效应。这些因素都会影响到表头的测量精度。前面提到,数据是由积分积出来的,所以,如果从源头开始数据就出现偏差的话,通过算法时,这个误差会一直累积下去,并会越来越大。所以表的精度不是很大的话,纯惯性导航飞行会很快发散。
一般的消费级小型无人机的传感精度就非常低,诸如多旋翼类的。几秒钟就不知道发散到哪里去了。而军用无人机的精度敏感度会非常高。其精度可以敏感到测量出地球自转的角速度。我们平时坐在椅子上,或者走在路上,都是感受不到地球自转的,敏感度相当高。
1958年7月美国海军鹦鹉螺号核潜艇进行了一次穿越北极冰盖的探险航行。鹦鹉螺号装备有一套N6-A惯性导航系统和一套MK-19平台罗经,从珍珠港出发,穿越北京冰盖,最终到达英国波特兰港,历时21天。其中穿越北极时以20海里的时速在水下潜航8146海里,在即将到达目的地时潜艇浮出水面,经测量,定位误差仅为20海里。
鹦鹉螺号的成功充分显示了惯性导航系统有别于其它导航系统的独特优点:自主性、隐蔽性、信息的完备性。这些特点在军事应用中显得尤其重要。
责任编辑:gt
-
无人机的GNSS导航系统高精度定位定向模组M20D实现应急救援技术原理2023-08-25 5766
-
#硬声创作季 无人机设计导论:无人机导航系统设计Mr_haohao 2022-10-27
-
为无人机上传感器网络使用能量收集2016-03-03 2937
-
详解GPS导航系统中的惯性技术2020-06-13 4428
-
山东无人机反制设备保障信息不被泄漏2020-08-12 1106
-
各类反无人机技术的优势2022-08-25 28013
-
一种小型无人机的导航系统方法设计2016-01-04 912
-
无人机的指挥中枢:GPS模块导航系统2017-09-12 2006
-
如何使用北斗进行农用无人机的自主导航方法研究2019-05-13 2410
-
测绘无人机没有了GPS会有什么后果2019-11-18 6253
-
北斗卫星导航系统与无人机结合在农业领域的应用分析2020-09-21 2934
-
无人机飞控的三大算法是什么,具有什么特点应用2020-09-24 4230
-
多种导航技术结合的导航系统在无人机中的重要性及应用2020-11-06 5148
-
小型无人机的导航系统方法设计案例2023-11-06 573
-
无人机的导航技术分析2023-11-29 7587
全部0条评论

快来发表一下你的评论吧 !
