

教你如何用FOC电机控制MATLAB仿真!
描述
整体结构及功能介绍用MATLAB2013以上版本打开文件,看到如图1所示界面:
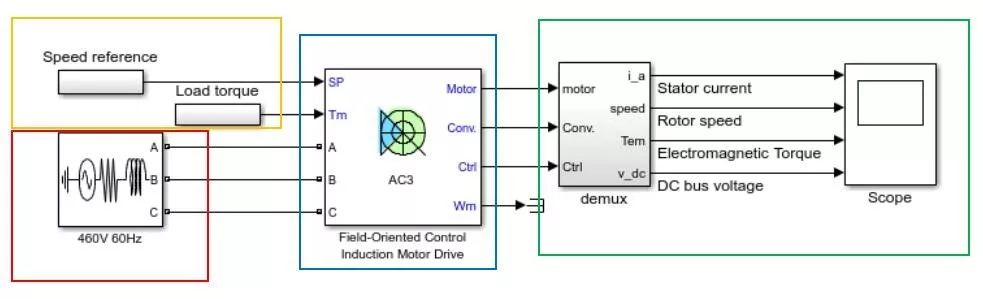
图1
可以看到仿真最外层由四个模块组成:电源模块(红色方框)、电机与控制模块(蓝色方框)、控制信号给定模块(黄色方框)、信号分路与显示模块(绿色方框)。其系统原理框图如图2所示:
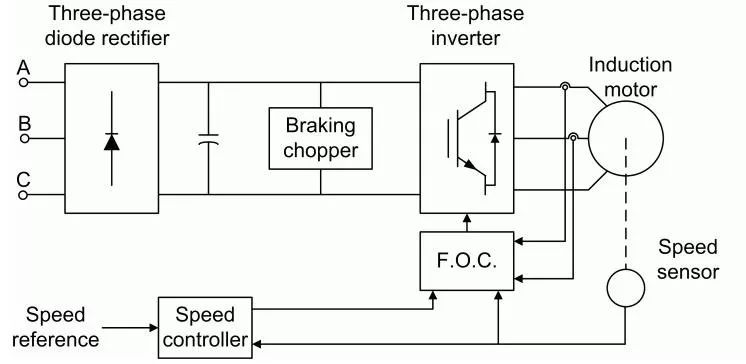
图2:最上层原理框图1、电源模块提供三相正弦交流电,幅值、频率、相位可调。2、控制信号给定模块可以设置电机的给定速度与负载转矩大小。3、按转子磁链定向的电机及其控制模块此模块是仿真的主体,实现对异步电机主体的转子磁链定向控制。4、信号分路与显示模块通过demux模块将复合信号进行拆分,得到想要观测的目标信号,并通过示波器进行显示。
FOC Induction Motor Drive
模块的详细说明右键点击FOC(Field-Oriented Control)Induction Motor Drive模块,按图3操作可看到此模块内部的具体结构,按下图操作可看到此模块内部的具体结构。
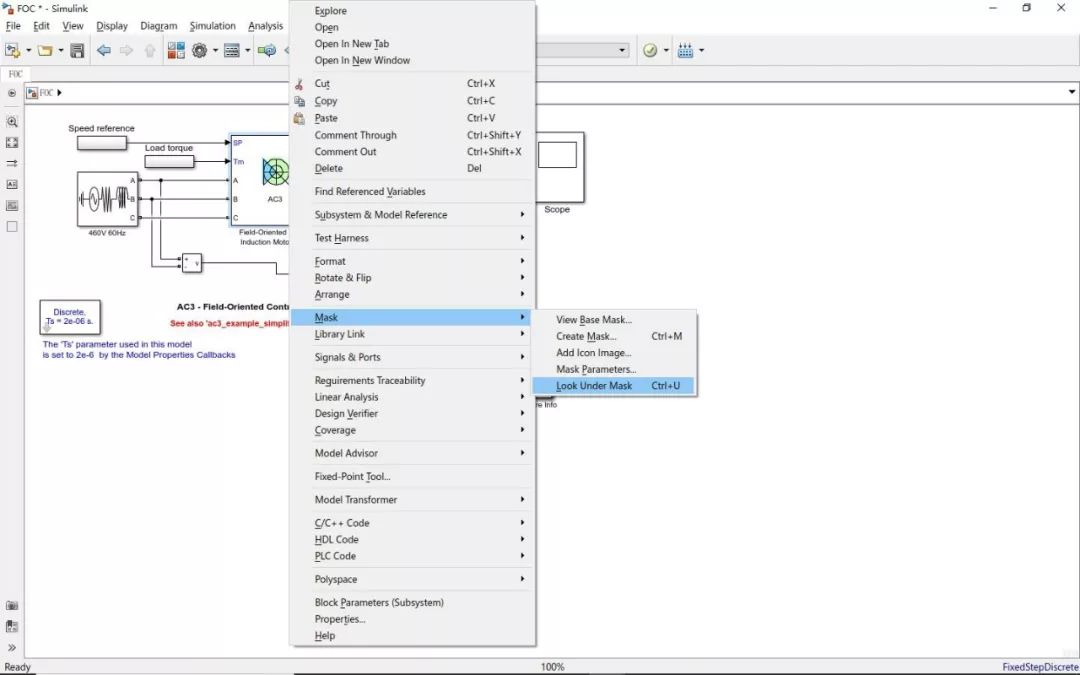
图3
其内部封装及模块功能说明如图4:
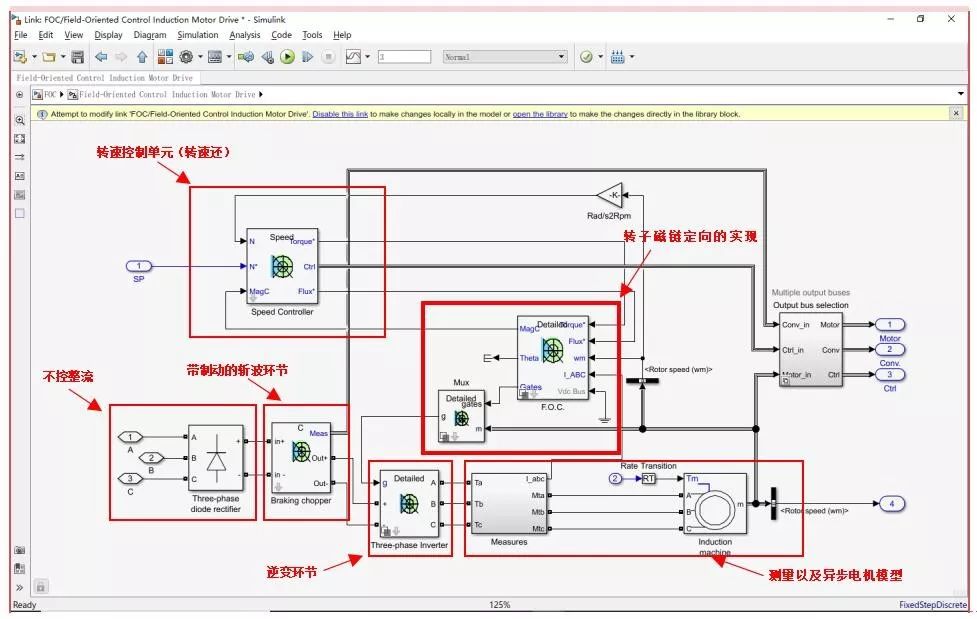
图4
1、不控整流将三相交流电源作为输入,通过此环节实现AC-DC的转换,得到直流电压。2、带制动的斩波控制环节此环节可以对获得的DC电压进行变换,通过斩波调制的方式得到可调的直流电压,是一个DC-DC的转换环节。此外因为前路的AC-DC环节是使用的不控整流,为了解决可能会有的泵升效应,此环节带有制动功能,将电机的馈入能量通过制动电阻进行消耗。3、逆变环节此环节实现DC-AC的变换,其输入的门极信号由FOC模块的输出提供,由此得到三相电压对异步电机进行驱动。4、转速调节环节实现电机对给定转速的追踪,并作为控制外环,将输出作为转矩的给定信号送入转子磁链定向控制模块。双击此模块,具体结构如图5:
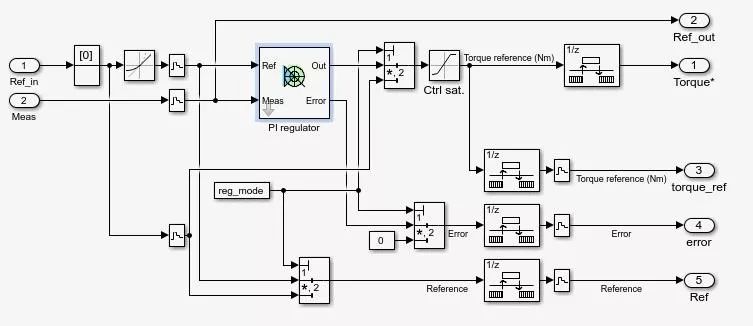
图5
其简化的系统框图如图6所示:
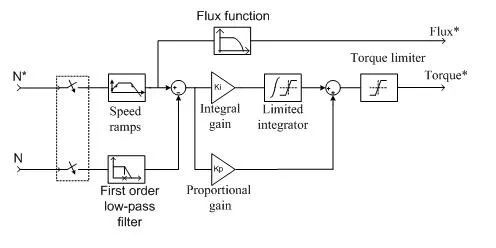
图6
由实际转速和给定转速作为输入量,通过PI控制器得到转矩给定,作为输出量,送至FOC模块。其中MagC是一个二进制信号,表示机器是否足够磁化以启动(1)或不(0)。该信号通常由磁场定向控制器FOC提供。
5、FOC模块双击打开FOC模块内部封装,可以看到如图7结构:
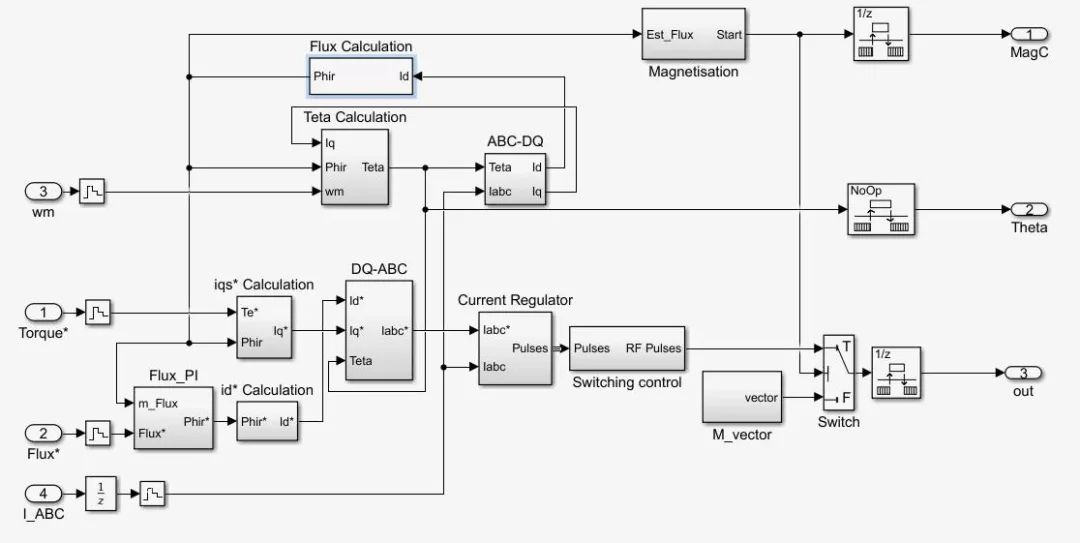
图7
其中有11个模块,简化的原理框图如图8:
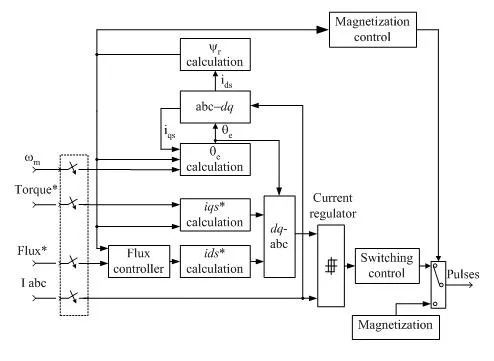
图8
在FOC控制模块中总共有11个子模块分别是:
Flux calculation(转子磁链ψr计算模块)通过定子电流的d轴分量计算转子磁链。
Teta calculation(转子磁场相角Θe计算)
ABC-DQ(3/2变换)
DQ-ABC(2/3变换)
iqs*计算模块通过计算所得的转子磁通和转矩给定求取长生电磁转矩的定子电流q轴分量。
ids*计算模块通过给定转子磁通计算产生转子磁通的定子电流d轴分量。
电流滞环调节器(Current regulator)通过电流滞环比较产生驱动逆变器的脉冲。
开关控制模块(Switching control)将逆变器换向频率最大值限制为用户给定的最大值。
磁通控制器(Flux_PI)通过PI控制,减少稳态磁通误差,控制磁通动态变化。
磁化矢量模块(M_vector)创建电机初始磁通矢量。
磁化控制模块(Magnetization)提供磁化和正常工作模式下的逻辑信号,也即产生MagC信号。
6、测量及异步电机模块
对逆变器输出量进行测量,并且可以对异步电机的参数进行设置。
波形分析运行仿真,得到如图9所示波形
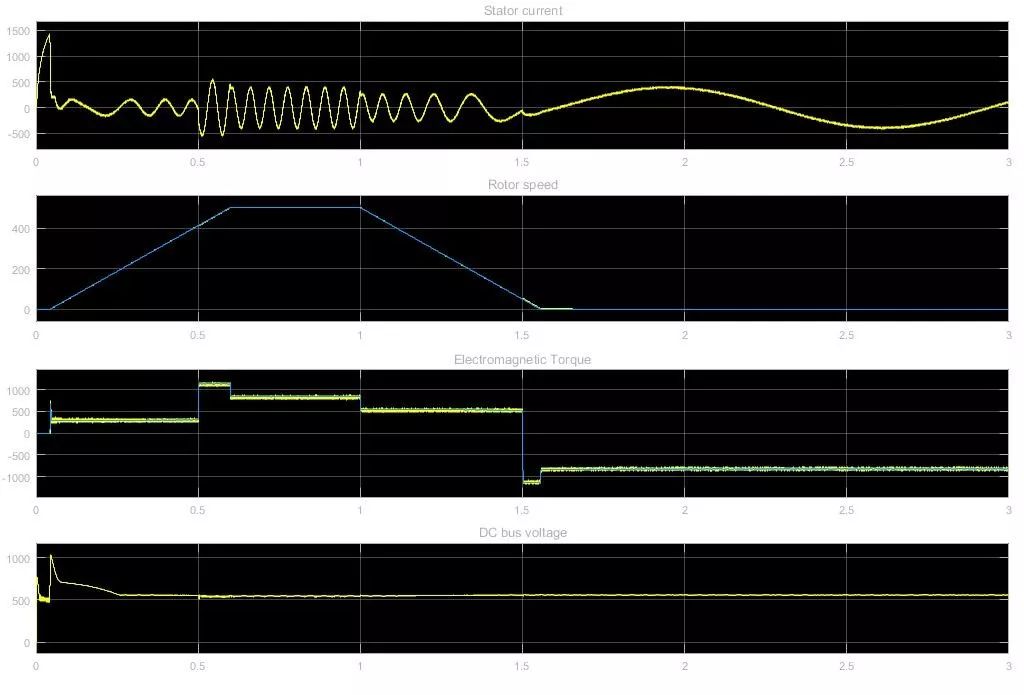
图9
0-0.045s:开始的时候,转速为零,转矩为零,定子电压和直流侧电压不为零,此阶段为磁化阶段,定子电流建立磁场。
0.045-0.5s:磁化完成,电机开始进行转速调节,转速升高。定子电流频率随着转速升高减小。
0.5-0.6s:到0.5s时,负载转矩增加为设定值,为了维持转速的增加,电磁转矩相应增大,定子电流增加,定子电流频率随着转速升高进一步下降。第0.6s,电机达到给定转速500r/min,此时电磁转矩等于负载转矩
0.6-1s:电动机恒速运行,转矩与定子电流不再变化。
1-1.5s:此时转速给定变为0,电机电磁转矩减小,电机在负载转矩的作用下进行减速,定子电流幅值减小,频率增加。
1.5-1.55s:此时负载转矩变为负值,电机变为发电机运行,此时转速不为零,为了跟随给定转速,电磁转矩要比负载转矩要小,这样才能继续实现减速,从而跟随给定,至1.55s时转速变为零。
1.55-3s:电磁转矩等于负载转矩,电机速度为零且保持不变。
电机参数
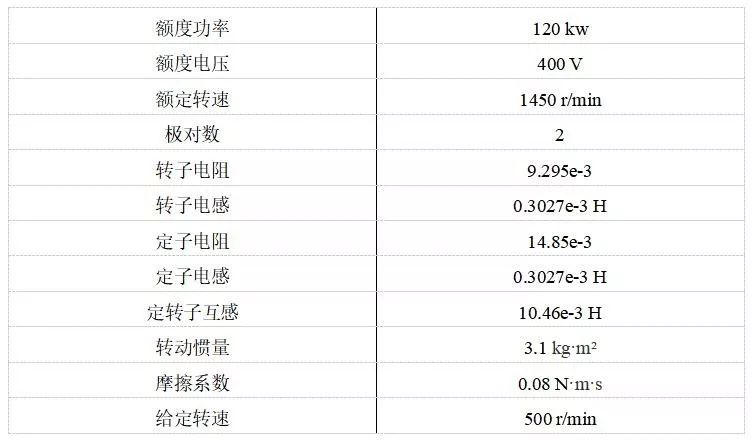
图10:电机参数表
-
如何用FOC电机控制MATLAB仿真!2025-03-28 3091
-
手把手教你MATLAB无感FOC电机看着代码生成,付赠资料。2023-05-29 1731
-
手把手教你MATLAB,Sumlink代码生成。无感FOC算法从零到生成代码的过程。附上MATLAB代码生成仿真模型。2023-05-28 7475
-
永磁同步电机FOC控制的基本原理及Matlab/Simulink仿真分析2023-05-23 8714
-
现代永磁同步电机控制原理及MATLAB仿真源码/模型2022-09-05 1431
-
永磁同步电机矢量控制matlab仿真2021-08-31 1773
-
怎样去分析基于MATLAB的FOC仿真部分?2021-07-26 1324
-
如何用MATLAB实现静态仿真电子版下载2021-05-27 1197
-
如何用FOC电机控制MATLAB仿真2020-06-19 4129
-
电子书:电机驱动设计心得, 五大步骤教你学!2020-06-12 4885
-
【技术分享】手把手教你做FOC控制MATLAB仿真(免费赠送13份经典FOC算法案例)2019-12-11 9131
-
怎么使用Matlab进行电机控制算法仿真?2018-07-13 8740
-
如何用matlab做步进电机的细分驱动仿真2016-08-11 6893
全部0条评论

快来发表一下你的评论吧 !
