

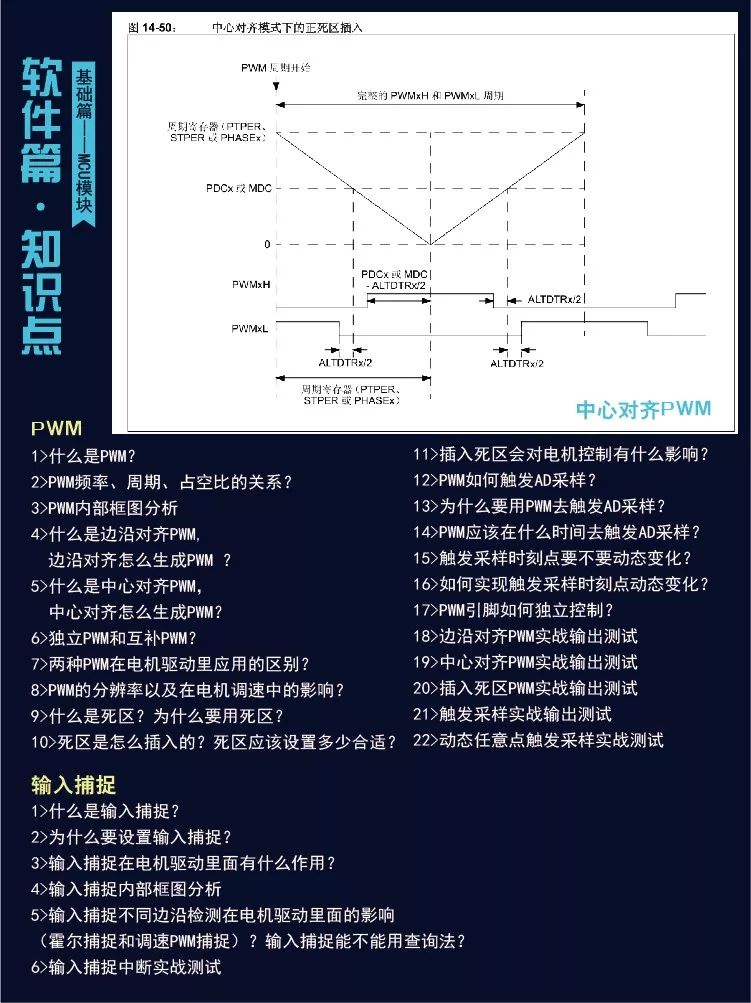
LDC电机可以根据应用要求采用边排列或中心排列PWM信号
描述
无刷电机属于自换流型(自我方向转换),因此控制起来更加复杂。BLDC电机控制要求了解电机进行整流转向的转子位置和机制。对于闭环速度控制,有两个附加要求,即对于转子速度/或电机电流以及PWM信号进行测量,以控制电机速度功率。
BLDC电机可以根据应用要求采用边排列或中心排列PWM信号。大多数应用仅要求速度变化操作,将采用6个独立的边排列PWM信号。这就提供了最高的分辨率。如果应用要求服务器定位、能耗制动或动力倒转,推荐使用补充的中心排列PWM信号。
许多不同的控制算法都被用以提供对于BLDC电机的控制。典型地,将功率晶体管用作线性稳压器来控制电机电压。当驱动高功率电机时,这种方法并不实用。高功率电机必须采用PWM控制,并要求一个微控制器来提供起动和控制功能。
控制算法必须提供下列三项功能:
用于控制电机速度的PWM电压
用于对电机进整流换向的机制
利用反电动势或霍尔传感器来预测转子位置的方法
脉冲宽度调制仅用于将可变电压应用到电机绕组。有效电压与PWM占空度成正比。当得到适当的整流换向时,BLDC的扭矩速度特性与以下直流电机相同。可以用可变电压来控制电机的速度和可变转矩。
功率晶体管的换向实现了定子中的适当绕组,可根据转子位置生成最佳的转矩。在一个BLDC电机中,MCU必须知道转子的位置并能够在恰当的时间进行整流换向。
FOC技术与普通马达驱动技术的优势在哪?
■ 无刷直流电机(BLDC)既继承了直流电机良好的调速性能,能够在重负载的情况下,实现均匀、平滑的无级调速,又避免了传统的有刷直流电机进行电刷摩擦换向所导致的电机接触不良、不发电等一系列问题,因此越来越受到人们的关注。
■ 目前市场主流的无刷直流电机的控制方式有3种:FOC、方波控制(也称为梯形波控制、120°控制、6步换向控制)和正弦波控制,三种控制方式各有优势。
■ 方波控制方式的优点是控制算法简单、硬件成本较低,使用性能普通的控制器便能获得较高的电机转速。而缺点是转矩波动大、存在一定的电流噪声、效率达不到最大值,所以方波控制适用于对电机转动性能要求不高的场合。
■ 正弦波控制实现了电压矢量的控制,间接实现了电流大小的控制,但是无法控制电流的方向。FOC控制方式可以认为是正弦波控制的升级版本,实现了电流矢量的控制,也即实现了电机定子磁场的矢量控制。
■ FOC控制按照电机有无传感器(一般为编码器)来区分可以分为有感FOC和无感FOC,前者通过传感器反馈电机转子的位置信息,控制相对简单,但对控制性能要求较高。后者由于电机不带任何传感器,所以在控制中需要通过采集电机相电流,使用位置估算算法来计算转子位置,所以控制难度较大,但是它可以避免传感器故障的风险,并且省去了传感器的成本,同时简化了电机与驱动板间的布线。
■ 大量的电机控制应用一直在持续不断地寻求提高效率同时降低系统成本的方法,这是两个推动改进现有电机控制技术的主要因素,所以在中、低成本应用中,效率是使得FOC比标量和梯形控制方法更受欢迎的另一个原因。
FOC技术与市面上FOC技术的优势与特色
■ FOC 需要复杂的数学算法,这对于普通设计人员来说可能并不熟悉,所以在过去,设计师们通常依赖于复杂的数字讯号处理 (DSP) 芯片来实现无传感器FOC。
■ 而且目前关于FOC技术而言,虽然有多家芯片制造商开发了专用于电机控制的芯片,而且也应用他们的芯片实现了FOC电机控制的相关算法,但是他们的FOC电机控制算法并没有完全开源,只是提供了一个函数API供用户使用。也有一些国内的芯片厂商将FOC控制相关的模块使用硬件的方式集成在了芯片内部,用户只需要去配置一些相关的寄存器就可以使用FOC算法来控制电机。而且也有一些公司也确实是使用了以上的方式应用到了相应项目中。
■ 但是,在目前的市面上没有真正达到开源FOC算法的厂家。绝大多数工程师并没有了解FOC电机控制算法,也没法自己独立的去编写相关代码,仅仅只是局限于对原有非核心代码的小修小补来完成项目的开发。
■ 而我们本次线上班的目的就是完全解决上面的瓶颈,让大家不再只会调用相关函数API接口,我们的所有代码不调用任何库函数,让大家真正学会如何自己去编写FOC算法里面的代码,知道每条代码的含义。还会带领大家一起把相关算法的理论全部推导一遍,比如SVPWM算法、滑模观测器算法等,让大家知其然还要知其所以然。
■ 本次线上班采用视频加辅导的形式,学员自己白天先观看老师录制的教学视频,如果学员对视频中有不是太明白的地方,晚上老师会在群里跟学员们互动,带领大家把当天的课程中的问题解决掉。
FOC线上班知识要点




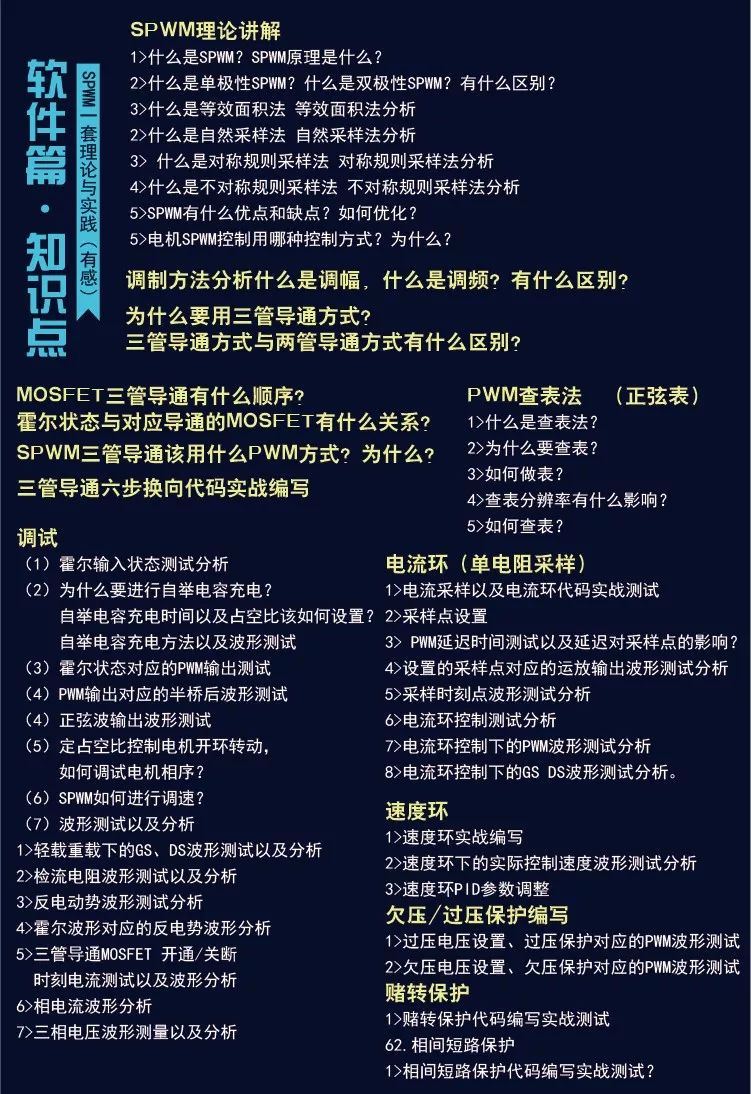
FOC开发板的展示、原理图、pcb、实物、代码
原理图

pcb图
实物图
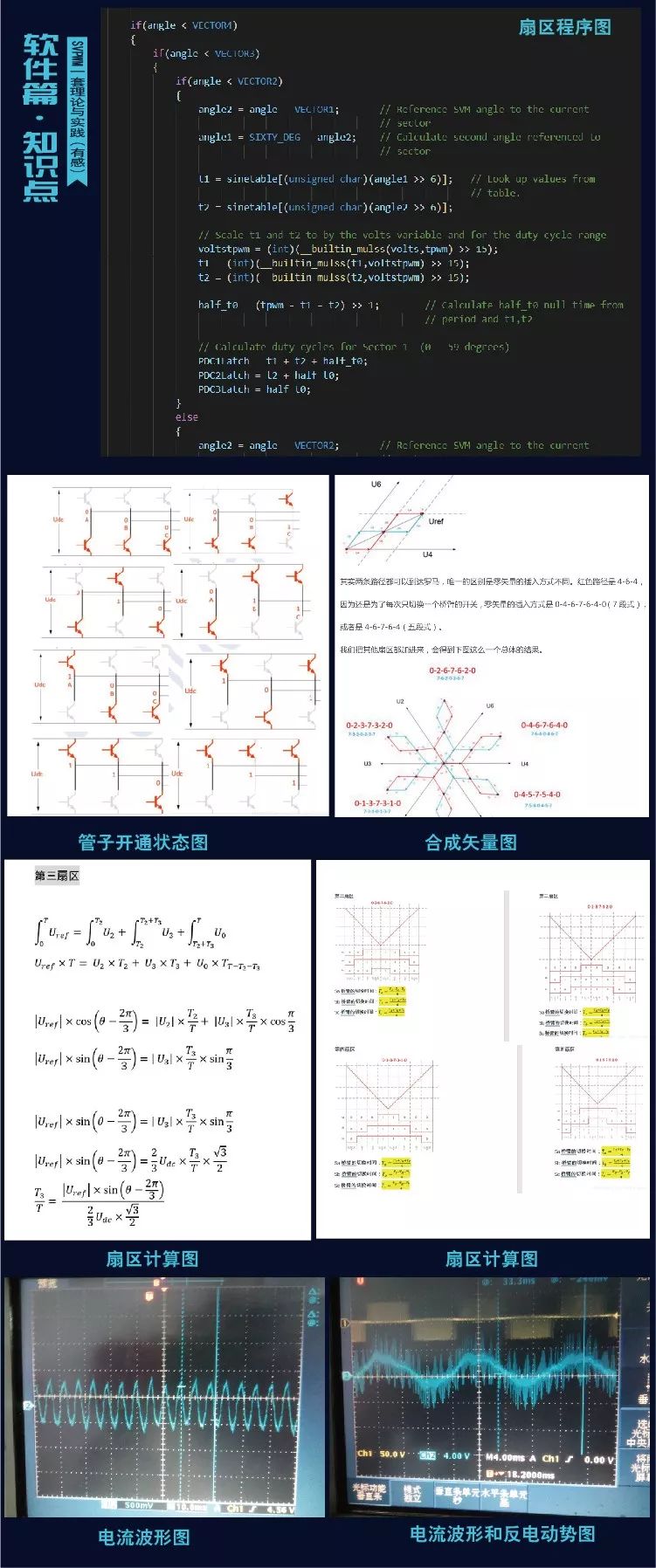
SVPWM算法推导

滑模观测结构图
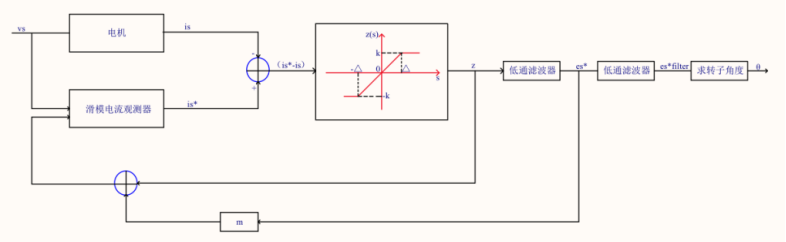
滑模观测器理论推导
坐标变换推导
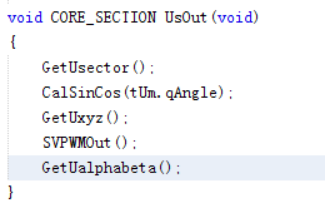
SVPWM算法函数
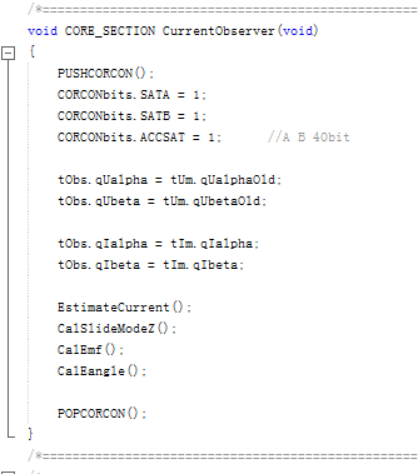
滑模观测器算法函数
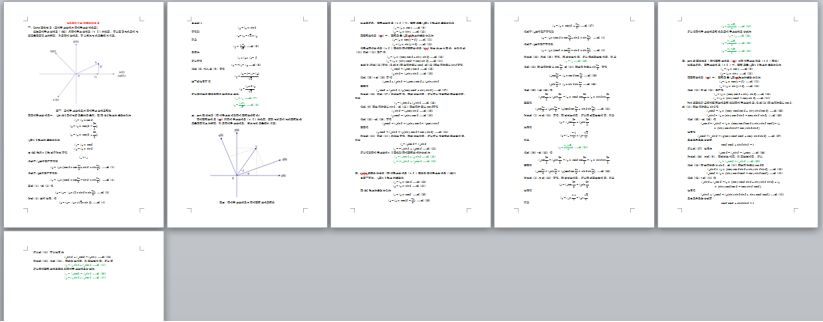
FOC相关波形图
三相定子电压波形
Ealpha、Ebeta与位置角
PWM生成的马鞍波
PWM生成的马鞍波
Ua、Ub、Uc经CLARKE变化为Ualpha、Ubeta
定子电流矢量角与转子位置角
电机开环启动电流
电机开环切闭环过程
电机闭环电流波形(空载)
-
介绍一种BLDC电机控制算法2021-09-07 0
-
BLDC电机控制算法最强解析,入门到进阶!2022-01-07 0
-
元器件的排列方式有哪些?2009-12-03 2834
-
LCD中的TN排列和IPS排列的介绍2017-09-27 4251
-
PCB设计的元件排列方式和布局要求2019-09-14 9285
-
详细介绍无刷电机PWM控制的三种算法2021-04-26 8184
-
什么是无刷电机PWM控制,它的特点有哪些2021-09-17 7312
-
电机控制的原理2023-04-27 1680
-
电机控制算法,超强整理2023-08-31 1133
-
常见电机控制算法2023-09-08 707
-
工业连接器引脚排列6种方式大汇总2023-09-22 1144
-
PCB上那么密集的过孔,规则排列还是随机排列?2023-11-24 805
-
集成芯片内部引脚排列原理2024-03-21 1736
全部0条评论

快来发表一下你的评论吧 !
