

闭环控制系统基本组成_闭环控制系统日常举例
电子说
描述
闭环控制系统基本组成
一个典型的反馈控制系统的基本组成可以用图1.8所示的框图表示。将组成系统的元件按在系统中的职能来划分,主要有以下几种:
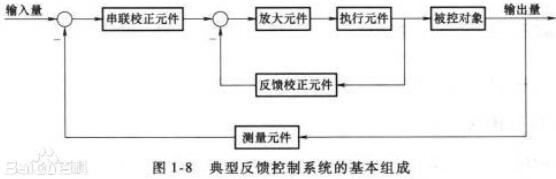
(1)给定元件:给出与期望输出对应的输入量。
(2)比较元件:求输入量与反馈量的偏差,常采用集成运算放大器(简称集成运放)来实现。
(3)放大元件:由于偏差信号一般较小,不足以驱动负载,故需要放大元件,包括电压放大及功率放大。
(4)执行元件:直接驱动被控对象,使输出量发生变化。常用的有电动机、调节阀、液压马达等。
(5)测量元件:检测被控量并转换为所需要的电信号。在控制系统中常用的有用于速度检测的测速发电机、光电编码盘等;用于位置与角度检测的旋转变压器、自整机等;用于电流检测的互感器及用于温度检测的热电偶等。这些检测装置一般都将被检测的物理量转换为相应的连续或离散的电压或电流信号。
(6)校正元件:也叫补偿元件,是结构与参数便于调整的元件,以串联或反馈的方式连接在系统中,完成所需的运算功能,以改善系统的性能。根据在系统中所处的位置不同,可分别称为串联校正原件和反馈校正元件。
闭环控制系统日常举例
闭环控制系统:反馈控制系统又称闭环控制系统。输出对控制效果有直接影响。工作原理:闭环控制有反馈环节。通过反馈系统,提高了系统的精度,缩短了响应时间。它适用于响应时间和稳定性要求较高的系统。
例如,控制对象是温炉,输出变量是实际炉温,输入变量是给定的恒温,一般用电压表示。炉温用热电偶测量。将代表炉温的热电动势与给定的电压进行了比较。二者的差分电压用于驱动相应的执行器进行功率放大后的控制。
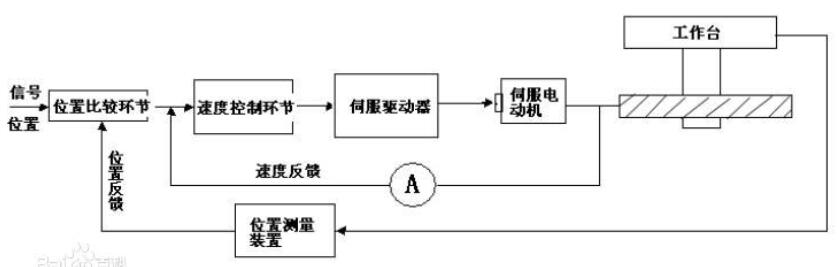
这是一种自动控制系统,其中包括功率放大和反馈,使输出变量的值响应输入变量的值。数控装置发出指令脉冲后,当指令值送到位置比较电路时,此时若工作台没有移动,即没有位置反馈信号时,指令值使伺服驱动电动机转动,经过齿轮、滚珠丝杠螺母副等传动元件带动机床工作台移动。装在机床工作台上的位置测量元件,测出工作台的实际位移量后,后反馈到数控装置的比较器中与指令信号进行比较,并用比较后的差值进行控制。若两者存在差值,经放大器后放大,再控制伺服驱动电动机转动,直至差值为零时,工作台才停止移动。这种系统称为闭环伺服系统。
-
闭环控制的主要组成包括什么2024-08-23 4330
-
闭环控制系统的工作原理和基本组成2024-06-13 9479
-
闭环控制系统的原理和组成2024-06-05 7070
-
怎样利用电机旋转角度和转速双闭环去搭建一个双闭环控制系统?2021-07-22 1866
-
基于ARM和DSP的谐波实时闭环控制系统2021-06-15 1125
-
闭环控制系统名词解释_闭环控制系统与开环控制系统有什么不同2020-08-05 18136
-
闭环控制系统的结构框图2019-01-12 43158
-
开环控制系统与闭环控制系统的举例说明2017-10-15 11617
-
闭环控制系统方框图27例2017-01-04 1692
-
基于DSP的SVPWM变频压力闭环控制系统2016-04-15 643
-
LPG发动机_闭环控制系统2010-01-01 924
-
基于VXI的快速闭环控制系统2009-07-10 922
全部0条评论

快来发表一下你的评论吧 !
