

KUKA-WorkVisual-导出/导入PROFINET节点配置
描述
导出 PROFINET 节点配置:
PROFINET 节点包含没有下一级 PROFINET Device 的机器人控制系统的PROFINET 配置。
项目已打开。
机器人控制系统已设为激活。
PROFINET 节点已配置完毕。
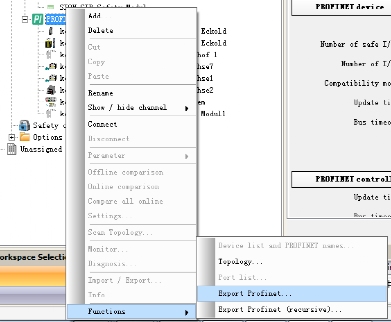
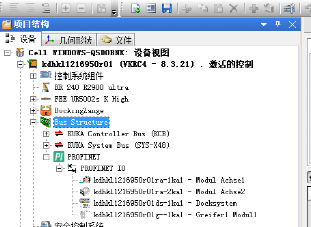
1.在窗口项目结构的选项卡设备中展开机器人控制系统的树形结构。
2.在树形结构中用右键点击 PROFINET 节点并在快捷菜单中选择 功能 > 导出Profinet... 。
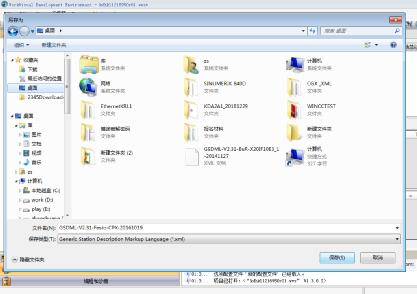
3.一个窗口打开。输入文件名并选择目录。
4.点击 保存。PROFINET 节点配置即被导出到文件名称结尾为 KPNX 的 XML文件中。
导出整个 PROFINET 配置
整个 PROFINET 配置包含 PROFINET 节点的配置以及所有下级 PROFINET Device 的配置。
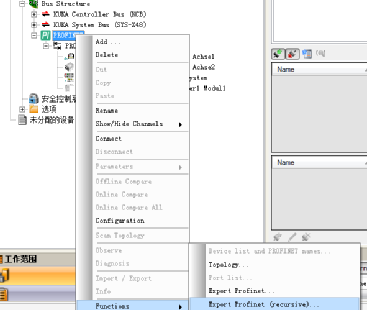
1.在窗口项目结构的选项卡设备中展开机器人控制系统的树形结构。
2.在树形结构中用右键点击 PROFINET 节点并在快捷菜单中选择 功能 > 导出 Profinet ( 递归 )... 。
3.一个窗口打开。输入文件名并选择目录。
4.点击 保存。整个 PROFINET 配置即被导出到文件名称结尾为 KPNX 的 XML 文件中。
导入 PROFINET 配置
如果项目中已经有一个 PROFINET 配置,则该配置在导入时被覆盖,并且所有逻辑映射全部被删除!不能只导入一部分。
1.选择菜单序列文件 > 导入 / 导出。一个窗口打开。

2.选择 导入工业以太网 XML。并且点击继续 >按键。
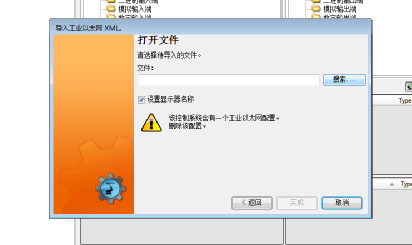
3. 点击 查找 ... 并指定目录。
4. 仅当 PROFINET 配置中的名称应显示在树形结构中时:勾选 设置显示器名称。
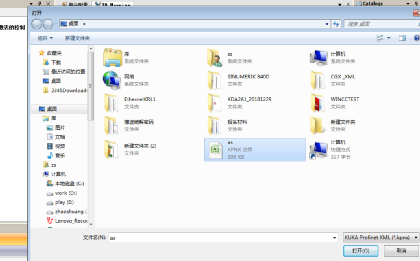
5.点击 完成。PROFINET 配置即被导入。
6. 关闭窗口。
导出 PROFINET Device 配置(GSDML文件)
1. 在窗口项目结构的选项卡设备中展开机器人控制系统的树形结构。
2. 在树形结构中用右键点击 PROFINET Device 并在快捷菜单中选择功能 > 导出 Profinet...。

3. 一个窗口打开。输入文件名并选择目录。
4. 点击 保存。PROFINET Device 配置即被导出到文件名称结尾为 KPNX 的 XML 文件中。
-
PLC与伺服完美融合:Profinet转EtherCAT网关配置详解2024-04-09 1761
-
Citect标签导入导出资料2011-05-10 1896
-
PCB设计:如何导入导出设计规则2018-06-05 10480
-
WorkVisual中的安全配置知识汇总2020-09-03 4015
-
WorkVisual中的安全配置2020-09-04 4061
-
PCB技术:Altium怎么安装导入导出插件2020-10-14 8534
-
KUKA-C4机器人如何导出/导入长文本2020-12-23 5220
-
MACSV数据库导出、导入的方法2021-09-17 1182
-
KUKA-C4机器人导出/导入长文本2022-07-26 3351
-
百万数据的导入导出解决方案2022-10-11 2401
-
WorkVisual中的安全配置范围包括哪些呢2022-12-06 1903
-
如何导入导出SCL源文件?2023-01-16 3697
-
TIA Portal Openness导入/导出的基本原理2023-06-21 6239
-
更改KUKA C 4 Windows系统的密码2023-12-12 3064
-
Kuka机器人配置Profinet通讯网关HT3S-PNS-ECS2024-06-13 2029
全部0条评论

快来发表一下你的评论吧 !
