

大摆臂气缸控制块FB410分析:
描述


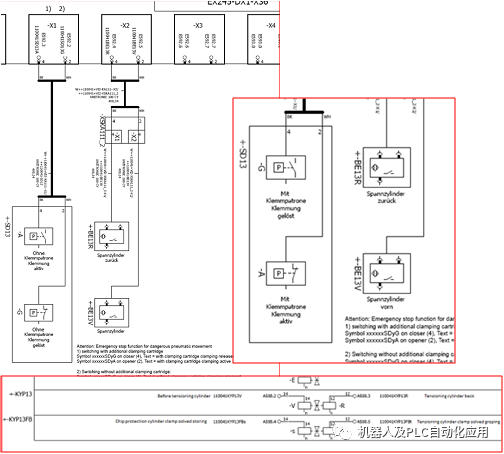
采用该模块,可以利用最多 8 个末位位置反馈信号对提升和倾斜气缸(臂长超过300 mm )进行控制。末位位置反馈信号以字节的方式传送给模块。气缸通过一个五位两通换向阀(用于实现运动)和一个五位三通换向阀进行控制(用于实现夹紧)。该模块可以用于带/不带夹具盒的气缸。该模块一般采用自己的背景数据模块进行访问。
双阀压力控制:

故障列表:
MSys.xF_1 := xF_Frg; //故障释放故障
MSys.xF_2 := xF_VerR; //返回的锁定错误
MSys.xF_3 := xF_VerV; //伸出的锁定错误';
MSys.xF_4 := xF_BFG_R; //检测器控制R故障';
MSys.xF_5 := xF_BFG_V; //检测器控制V发生故障';
MSys.xF_6 := xF_EndR_voA; //离开后端位置没有任何
MSys.xF_7 := xF_EndV_voA; //尝试离开前的终点位置
MSys.xF_8 := xF_EndR; //不要离开后端位置
MSys.xF_9 := xF_EndV; //不要在离开终点位置之前
MSys.xF_10 := xF_ZuebR; //返回时间监控
MSys.xF_11 := xF_ZuebV; //伸出时间监控
MSys.xF_12 := (bF_Stoe & BYTE#1) <> BYTE#0; //‘STE/夹具气缸故障Zyl. a';
MSys.xF_13 := (bF_Stoe & BYTE#2) <> BYTE#0; //'STE/夹具气缸故障Zyl. b';
MSys.xF_14 := (bF_Stoe & BYTE#4) <> BYTE#0; //'STE/夹具气缸故障Zyl. c';
MSys.xF_15 := (bF_Stoe & BYTE#8) <> BYTE#0; //'STE/夹具气缸故障Zyl. d';
MSys.xF_16 := (bF_Stoe & BYTE#16) <> BYTE#0; //'STE/夹具气缸故障Zyl. e';
MSys.xF_17 := (bF_Stoe & BYTE#32) <> BYTE#0; //'STE/夹具气缸故障Zyl. f';
MSys.xF_18 := (bF_Stoe & BYTE#64) <> BYTE#0; //'STE/夹具气缸故障Zyl. g';
MSys.xF_19 := (bF_Stoe & BYTE#128) <> BYTE#0; //'STE/S夹具气缸故障Zyl. h';
MSYS.xF_20 :=xF_FB_1; //故障压力控制夹紧'
MSYS.xF_21 :=xF_FB_2; //夹钳故障未解除
MSYS.xF_22 := xF_KYPxxBER OR xF_KYPxxFBBER; //'STE/阀线圈故障'
摆臂控制原理:
-
USB 2.0分析仪 USB开发设计选择2016-06-02 2472
-
控制伺服电机的FB块怎么实现伺服的上电?2021-09-28 1444
-
气缸自动化控制电路图分析2018-01-06 23729
-
一文带你了解PLC中FB和FC块的区别2018-04-18 40746
-
PLC程序FB100模式控制整体分析2020-06-12 5049
-
FB412- 在VASS 标准中对大气缸的控制解析2021-02-15 3125
-
PLC控制中FB和FC块的不同之处2021-12-14 5429
-
OB FC FB块如何使用2022-08-15 10740
-
UM3016 如何使用STM32电机控制SDSK v6.0分析器2022-11-22 743
-
如何使用三菱梯形图FB块来高效完成PLC程序编写2023-01-29 18177
-
功能块(FB)的结构介绍2023-02-17 6701
-
PLC编程中OB块、FC块、FB块、DB块的使用原则2023-05-24 22393
-
西门子SCL编程实例—气缸控制函数块2023-06-28 3849
-
什么是FB功能块?为什么要使用FB功能块?如何制作一个FB功能块?2023-11-09 7632
-
在S7-1200/1500中创建气缸功能块的编程指南2025-02-13 4941
全部0条评论

快来发表一下你的评论吧 !
