

基于TMS320LF2407 DSP芯片实现机车蓄电池充电系统的设计
处理器/DSP
描述
1.前言:
铁路机车用铅酸蓄电池的充电装置目前大多还采用可控硅SCR、小容量的GTO、GTR、IGBT开关功率器件实现,这种充电方法不仅效率低、能耗大、功率因数低,而且存在严重的过充电和析气等现象,严重影响蓄电池的使用寿命。现代控制理论、现代电力电子理论的快速发展,为充放电系统的发展提供了坚实的理论基础;集成电路技术和嵌入式系统的飞速发展,尤其DSP芯片的诞生和发展为充放电技术的发展提供了广阔的前景。本文叙述的充电系统将DSP和三相电压型变流器结合,研制的机车蓄电池充电装置具有良好的综合性能。
2.系统构成
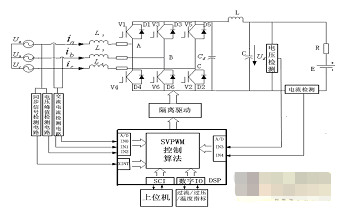
图1 系统结构图
DSP是智能充电装置的核心控制部件,它根据直流侧电流反馈、电压反馈、温度采样情况以及上位机的电压、电流给定,计算产生功率模块所需的SVPWM波形,同时根据外部控制信号以及内部和外部的异常信号(如电网波动较大)做出保护的动作。同时,DSP实时地将充电系统的过程参数送到上位机显示,并实时接收来自上位机的给定参数。功率模块采用具有自关断能力、导通与关断控制十分方便、不需辅助换相电路的IGBT;驱动控制模块采用具有“先降栅压、后软关断”的双重保护功能的HL402 模块。
3.主电路设计
系统性能指标要求:
1) 输出电压:95~125V
2) 输出电流:10A~60A,连续可调
3) 输出、电压电流精度: 0.5%
4) 功率因数: 0.99
5) 效率: 75%
6) 纹波系数: 0.5%
蓄电池主电路采用三相电压型变流器(VSR)、并根据上述性能参数选择合适的电感、电容、变压器。
图2 蓄电池充电主电路
假设电网输入电压对称,VSR在ABC坐标系下的数学模型[4]为:
(1)

若三相VSR入端期望的电压空间矢量为:

(2)
遵照功率不变原则,根据SVPWM算法选择八个基本空间矢量。
4.控制电路设计
本系统既要实现综合控制,又要完成空间矢量复杂的算法,所以采用专为数字控制系统应用进行了优化设计的TMS320LF2407 DSP芯片。其内部具有两个事件管理器(EV),每个EV模块都含有极为简化的产生对称空间矢量PWM波形的内置硬件电路,以及内置的A/D、RAM等,从而外部电路非常简单。
图3 DSP硬件控制电路
软件实现采用模块化设计,整个系统通过调用子程序和接受、处理中断来完成检测和控制。系统软件实现的结构图如下:
图4 DSP软件实现的结构图
主程序模块完成系统初始化;同步中断模块强制软件中的角度从零开始,达到与外部输入电压同步。通用定时器1下溢中断实现PID算法、坐标变换、电压空间矢量PWM ,产生SVPWM波形。通用定时器2下溢中断完成数据的串行通信,将现场采集和计算的数据送到上位机显示,并接收来自上位机的控制参数。
5.结束语
蓄电池充电实验交流侧电压、电流波形如图6所示,输入电流与输入电压同相位,功率因数接近于1。直流侧电压电流如图7所示,电压和电流均恒定不变。蓄电池充电装置的各项性能指标均达到了预期要求,装置工作稳定可靠,噪声小,实果令人满意,说明了该蓄电池充电装置方案的可行性和先进性。
责任编辑:gt
-
基于TMS320LF2407的电力暂态信号采集系统2016-05-06 663
-
基于TMS320LF2407的直流调速系统设计与实现2016-05-05 650
-
基于TMS320LF2407芯片的伺服系统的设计2016-04-26 714
-
基于TMS320LF2407的步进电机控制系统2016-04-25 779
-
基于TMS320LF2407芯片的SVPWM变频调速系统2016-04-19 774
-
TMS320LF2407上实现快速傅里叶变换2016-01-19 729
-
TMS320LF2407的FFT算法程序2015-12-29 740
-
TMS320LF2407 DSP结构、原理及应用实验指导书2009-05-12 1113
-
基于Matlab的TMS320LF2407程序快速设计2009-04-20 1383
-
TMS320LF2407 CAN控制器实验2008-10-17 1395
全部0条评论

快来发表一下你的评论吧 !
