

气伺服焊钳平衡缸故障分析
描述
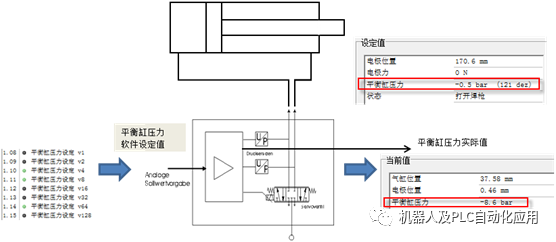
焊钳结构:---平衡缸的位置
平衡缸控制阀的位置:
MPYD为压差控制阀,可对平衡缸压力在+/-10bar之间调节,由机器人控制给入:
焊钳进行位置模式控制下:
平衡气缸处于缩回位置 ΔP < 0
焊接臂顶住螺钉,停止锁死位置,E719
焊钳在力模式控制下:
平衡气缸处于伸出位置 ΔP > 0
焊接臂自由状态,浮动位置.! E719
机器人控制A729-A736:平衡缸压力设定: 采用二进制控制.BIN2
$BIN_OUT[2]={F_BIT 729,LEN 8,PARITY #NONE}
5: bin2 ( EIN ) = 114 在夹紧焊接前会通过二进制给焊钳平衡缸值
6: WARTE BIS !E129 + E26
7: SPSMAKRO80 = EIN 焊接程序
bin2 ( EIN ) = 0-255 / 压力值: -10-à+1010bar
E12平衡缸超时: 原因: 平衡气缸,MPVD平衡缸比例阀,线束.
| 平衡缸压力未能在2秒内达标。 | 气源供给压力足够高么?检查 MPYD /电缆 | 出现故障后会没有E705准备就绪 |
出现平衡故障时:
1.如果MPVD气阀没有坏时,可以通过用WD-40进行润滑气缸.
2.如果润滑无效直接检查连线.
3.连线无问题,直接换MPYD阀.
平衡缸回位信号: 焊接过程时如果平衡系统没有问题时,平衡缸回位反馈E719应该是没有反馈的,而当进行轴运行时E719要始终有.
| E719 | Equalizer is back | 平衡气缸返回 |
拆解MPVD控制阀:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
液压缸排气装置故障维修2011-07-22 1177
-
气液增力缸:冲压特性分析2018-02-28 741
-
解析机器人平衡缸控制阀的位置2020-06-04 4987
-
电伺服焊钳铣削分析:用户铣削2020-06-11 3702
-
FESTO气伺服焊钳气管接错后故障分析2020-07-13 3497
-
KUKAC4大众版机器人报"伺服焊钳的滞后故障分析"如何解决2021-01-03 9918
-
气伺服焊钳为什么会发出钳E1超出软件限制报警2022-07-26 2105
-
FESTO焊钳故障报警分析2022-08-15 2945
-
VASS KUKA电伺服焊钳的SG_Background控制2023-01-14 2688
-
气伺服焊钳的力超时故障分析2023-04-24 1449
-
伺服电机十大故障分析2023-04-28 1965
-
为什么伺服电动缸用交流电更好2023-05-11 760
-
伺服电动缸选型要点和计算2023-08-23 4711
-
伺服电缸和伺服压机区别 伺服电缸能取代液压油缸吗2024-01-26 2178
全部0条评论

快来发表一下你的评论吧 !
