

红外反狙击手探测系统的原理和设计方案
测量仪表
描述
引 言
对付狙击手一直以来都没有很好的技术手段,一般采用“以毒攻毒”,即以己方的狙击手对付敌方的狙击手的方式。然而这种方式存在着太多的不确定性,不能确保发现敌方的狙击手,因此不适于不容有失的安全保卫行动。随着技术的发展,很多国家开发出狙击手探测系统,主要有声探测系统、红外探测系统和激光探测系统。这些系统或以被动方式测定射击弹道、确定狙击手位置,或以主动方式发现潜伏的狙击手,在一定程度上缓解了狙击手的威胁。
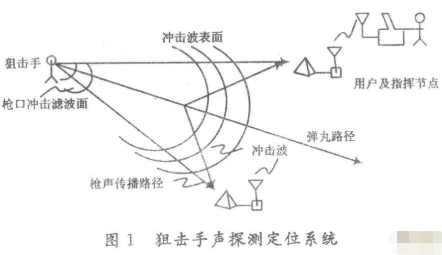
红外反狙击手探测系统通过探测枪口闪光和飞行弹丸的红外信号,来确定敌方狙击手的位置。红外探测器可以探测子弹出膛时的闪光,发现1 km距离内视线不被阻断的目标。激光反狙击手探测系统利用的是“猫眼”效应,猫眼在黑暗中发光,是由于猫的视网膜比身体其他部位的反射能力强。同样,即狙击手的瞄准望远镜也比周围背景的反射能力强,当不可见光波段的激光束照射到其表面时,就会产生狙击手不易察觉而激光探测系统能够检测到的较强反光,从而发现狙击手。狙击手声探测定位系统(如图1)通过布置一系列声传感器,通过精确测定枪口激波和弹丸飞行激波到达每个传感器的时间差,可以精确计算出射击位置,以及弹丸飞行弹道、飞行速度和枪械口径。
在国外,声信号探测是价格最低廉、测定最精确、使用最广泛的狙击手探测系统,而国内在这方面的研究还比较少。现以声探测技术在反狙击系统中的应用为目的,对该系统的组成及定位方法进行研究。
1 系统的组成
图2为被动声定位系统的硬件部分。系统将采集到的声信号送入数字信号处理器,通过时延估计和定位算法实现对目标的定位。
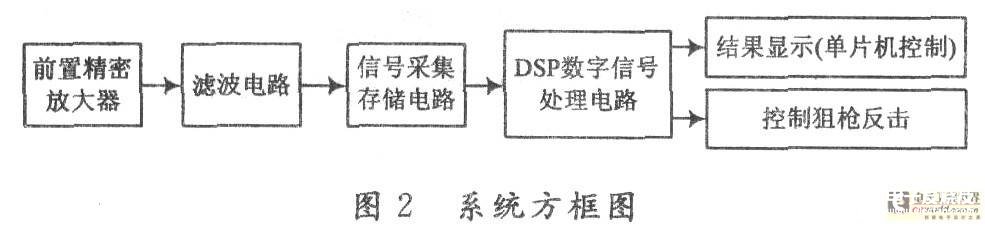
(1)传声器是智能雷弹系统的耳朵,它通过其敏感元件把声信号转换成电信号,再经过前置精密放大电路后以电压形式输出。其质量和性能直接影响到系统的精度和能否正确反映被测信号的全部信息。本系统采用的是驻极体式电容传声器。
(2)因为声源的位置不同,到达接收器的信号幅度强弱不同,因此选用数控放大电路。
(3)信号采集电路的分辨率和采样率是影响时延估计精度的重要因素,因此,采集电路的设计必须采用高分辨率,高采样率的数据采集系统。
(4)DSP是信号处理的核心,处理速度影响整个反狙击系统的反应速度,所以在成本允许的情况下,应选用处理能力越强、运算速度越快的DSP。本系统采用TI公司的TMS320C6711浮点型DSP芯片,其指令周期为6.7 ns。
(5)由于DSP直接接口需要DSP插入大量的等待周期,会导致实时显示与高速显示存在难以调和的矛盾,影响了通用方便性。鉴于此,用一片单片机来实现显示功能,DSP只要往外部存储器里写进数据,单片机根据读出的信息看是否显示,这样方便了编制程序以显示DSP的运行状态,克服了上述矛盾。
(6)由于测量精度的原因(假设目标距离为100 m,如果测出的角度有O.1°的误差,则子弹击中的目标距实际声源将有0.17 m的误差)及怕误伤到别人,因此本系统中未包含狙枪自动反击部分,而只是对目标方位进行检测和显示,人为进行反击。
2 系统定位原理及算法
2.1 基于小波变换的广义相关时延估计
广义相关法是在估计接收信号的相关函数之前,首先对其进行预滤波,即等效于频域的加权处理,以对信号和噪声进行白化处理,增强信号中信噪比较高的频率部分,抑制噪声功率,从而获得更好的时延估计精度。广义相关的权函数一般有4种,它们都需要信号和噪声的先验知识,而在实际应用中并不都知道信号和噪声的先验知识,特别是不知道噪声的先验知识。同时它仍没能取消信号必须是平稳的这个假设条件。这就限制了时延估计的应用,降低了时延估计的精度。为此本文将小波分析引入相关时延估计方法中来克服上述缺点。
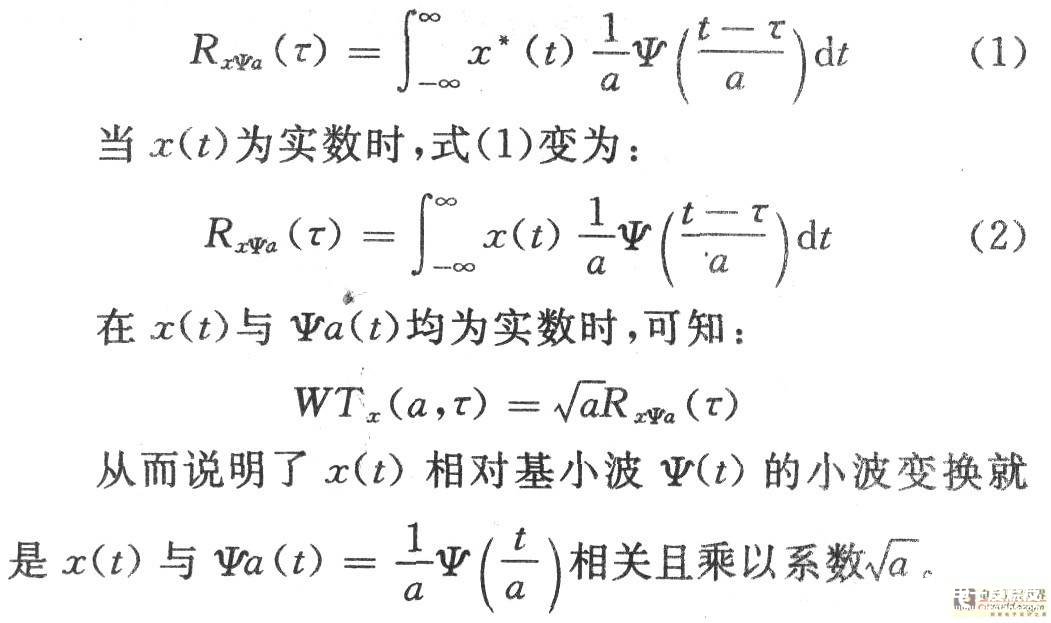
小波分析是把时域分析的频率域表征为尺度域,即用联合的时间和尺度平面来描述信号,由于小波的多分辨分析和小波包的多层分解,使它同时兼顾了短时傅里叶变换和时频分析的特点,故在处理非平稳信号中有一定的优势,由相关理论知:x(t)与ψa(t)的相关为:
借鉴广义相关时延估计理论的加权法,在此用基小波在不同尺度下的频谱ψ*(aω)对相关谱密度函数Gx1x2(ω)进行加权,从而得到了基于小波变换的广义相关时延估计。
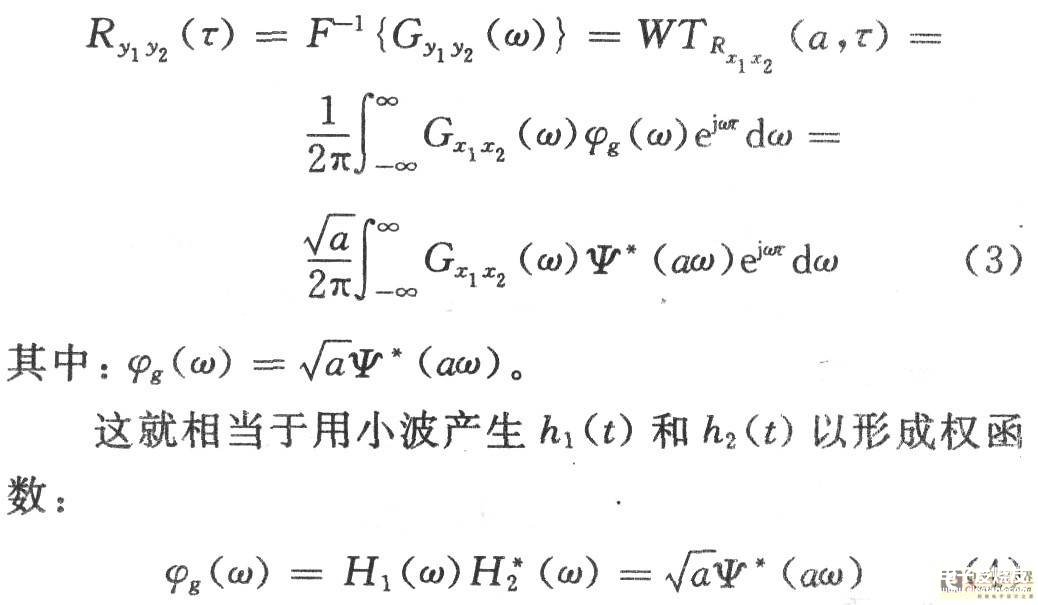
这就是说,在相关前,利用小波分别对信号x1(t)和x2(t)进行滤波。因为小波加权相对经典加权不需要信号和噪声的先验知识,这也可说在x1(t)和x2(t)相关后再用小波变换处理其相关函数Rx1x2(τ)。[page]
2.2 定位算法
声探测定位技术是利用目标发出的噪声来对目标进行定位的。如何设计性能优良、结构简单合理的声阵是被动声定位的关键技术之一。传声器阵列可分为线阵、面阵和立体阵。线阵结构简单,但线阵只能对阵列所在直线为界的半个平面进行定位。面阵可以在整个平面对目标进行定位,也可以对阵列所在平面为界的半个空间进行定位。立体阵则可以对整个空间进行定位,但其算法要复杂的多。从实际应用角度考虑,采用立体正方形阵来进行目标定位。
立体阵声探测定位系统传声器的布置如图3所示。其中S表示目标点声源,Ml,M2,M3和M4分别表示4个传声器。采用直角坐标系表示,4个传声器位于x0y平面上。设基阵边长为L,M1,M3高为h,则传声器的坐标分别为M1(L/2,L/2,h),M2(L/2,L/2,0),M3(L/2,一L/2,h),M4(L/2,一L/2,0)。目标点声源的坐标为(x,y,z)。S点距原点距离为r,目标方位角为ψ,仰角为θ,设声源S到M1,M2,M3和M4的距离分别为r1,r2,r3和r4。并规定dij表示传声器Mi与Mj距点声源的距离差,即:
在直角坐标系中,可以得到如下方程组:

3 仿真
由于小波变换中所用基小波具有不惟一性且在小波变换中采用不同的小波基分析同一个问题会产生不同结果,则基于小波变换的广义相关时延估计法存在最优小波基的选择问题。这里主要是通过用小波分析方法处理信号的结果与理论接触的误差来判定小波基的好坏,并由此选定小波基。该仿真在分析所有基小波特点并进行大量的、不同条件下仿真实验后,确定用dbN小波作为该时延估计法的基小波(选用db8,如图5所示)。需要说明的是基小波symN和coifN与dbN具有相似性,所以这里也给出基于sym4和coif5小波的仿真图,如图5所示。
为观察方便,由相关运算引起的仿真输出互相关函数在时间轴上平移了500个点在图中都没有减去。也就是说实际估计延迟时间应该等于输出互相关函数峰值对应延迟时间减去相关运算点数。
该仿真采用非平稳信号s(t)=2sin(2xft+qt),加入均值为零、方差为常数的高斯白噪声,其中f=30,q=4。运算点数为L=500,延迟点数为D=48。
对比各图可知基于小波变换的广义相关时延估计法不仅取消了直接相关时延估计法的假设条件,而且提高了时延估计精度,增加了时延估计的方法,扩大了时延估计的应用范围。
4 结 语
概述了声波定位技术在反狙击系统中的应用,分析了系统的组成部分,提出基于小波变换的广义相关时延估计方法,克服了传统的相关时延估计法的缺点,提高了时延估计精度和应用范围。该方法的缺陷是不能在每一个尺度上都很好地估计时延,同时有必要从理论上证明时延估计的最佳尺度。该系统的制作方法同样适用于反坦克及反直升机系统。
责任编辑:gt
-
天基红外探测系统的杂散光分析与计算2010-04-24 2324
-
BSD盲点探测系统2015-09-10 10302
-
基于DSP无人值守地面探测系统的硬件设计2021-02-04 1562
-
Linux的嵌入式红外热成像系统设计方案2010-04-16 1906
-
单片机实现PCB探测系统2012-02-09 1842
-
MEMS热电堆传感器的红外探测系统_王司东2017-03-19 1876
-
基于STM32的红外火灾探测系统设计2017-09-28 1219
-
基于方位测量的地下管线探测系统设计与研究2017-11-23 1278
-
基于STM32的视频探测系统电气控制方案2017-11-30 555
-
四路红外线探测系统和小车寻迹程序资料免费下载2019-09-04 1456
-
使用FPGA实现CCD探测系统的论文说明2019-11-29 1290
-
红外探测系统的核心组成部分是什么?2020-06-10 10862
-
基于MEMS热电堆红外传感器的红外探测系统2020-09-13 8045
-
基于电场探测与无线组网的新型探测系统2021-06-19 939
-
网络报警主机AL-9480H周界入侵探测系统的应用解决方案2024-05-10 2156
全部0条评论

快来发表一下你的评论吧 !
