

如何有效分拣测试中遇到的bug?
描述
研发自动驾驶的核心就是开发新的驾驶技能,然后测试该技能。测试中如果发现了问题,再逐一攻克。
而问题是,工程师们往往只擅长写代码,却忽视了通过测试找到代码中的问题。花一个月时间做好了一个新的驾驶技能,就以为万事大吉了。车一旦上路,问题(bug)却层出不穷。
其实,出了bug没关系,最重要的是要充分利用发现的bug,挖掘bug的根源,才能有效修复,避免再犯。
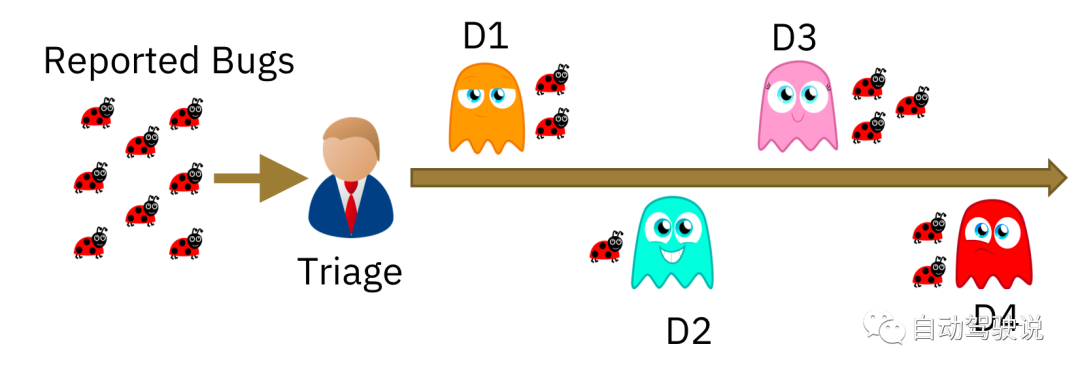
这就涉及到triage的学问。Triage字面意思是指对问题进行分拣,其实也泛指对问题寻根溯源(root-causing),也包括分拣时所需的工具。
传统互联网的triage过程相对比较简单,代码的层级不会太深。比如,一个对外链接断了,八成是因为那个链接已经挪了地方。
而自动驾驶则复杂很多。肉眼可见的只有那辆车以及坐在车里可以体验到的乘坐感受。背后却有成百上千个代码组成部分,每一个组成部分内部又有多层分级。一旦自动驾驶车出现问题,很难马上判断出到底是哪里需要修改。
比如,肉眼所看到的是,自动驾驶车没能及时躲避一位正在过马路的行人。这可能是摄像头的问题,可能是雷达的问题,可能是行为预测的问题,可能是定位的问题,也可能是高精地图的问题,等等。因此,我们需要一个高效、严谨的过程,快速找到bug根源。
我们可以将triage分为三个阶段。
1. Bug识别
2. Bug分拣
3. Bug追根溯源
第一阶段:Bug识别
发现bug的最直接方式就是在路上测试,然后将错误标注出来。准确的标注可以让工程师更快了解bug的类别。比如使用“突然刹车”、“偏离车道”这些关键词。
然而,大部分的bug很难通过驾驶直接体现出来。如果代码里有100个bug,很可能在驾驶中只能体现出两三个。有的bug只能在特定情境下才会被触发,平时不会被发现。而且有的bug可以被重现,有的则不能。今天在某个地方突然刹车,明天这个问题可能又没了。
因此,必须首先尽量将减少测试中的变量,不要等到上路测试才发现bug。比如,如果利用仿真进行测试,就可以对变量进行有效地控制,快速确认bug。
Bug识别的工具也有很多,比如可以通过指标报表,某项指标一旦发生变化,就报错。也可以通过各种前端工具,将车的探测结果进行可视化,错误就能一目了然。
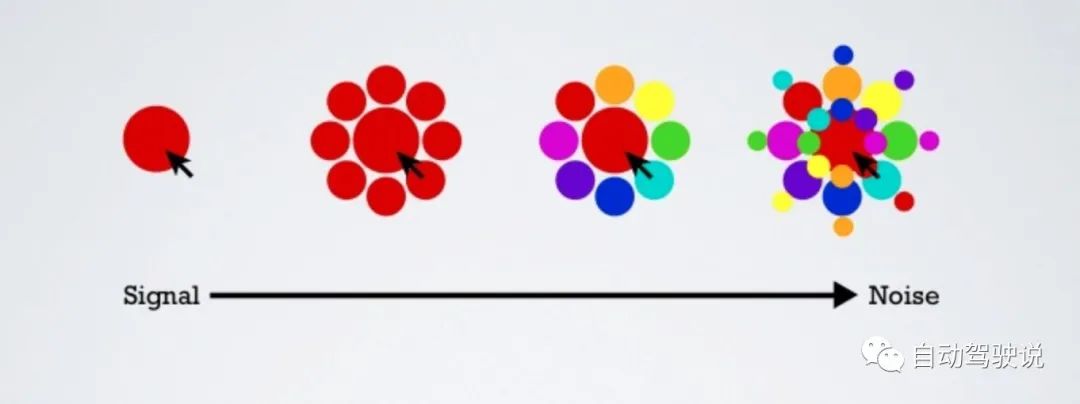
让系统自动报错虽然省时省力,但问题是,报错的数据中往往有很多杂音(noise),报告100个bug,其中也许只有几个是真正有价值的bug。因此,报错系统必须不断提升,才能提高信噪比(signal-to-noise ratio)。
第二阶段:Bug分拣
团队越大,bug分拣就越困难。假设一家公司里同时有二十个团队在过去一个月里碰过代码,那么如果出现了问题,这二十个团队就都有可能承担责任。如果不去对bug进行分拣,每遇到一个bug就让所有团队研究一次bug,会浪费很多工程师的宝贵时间。
因此,负责分拣bug的人必须对各个团队的业务了如指掌,帮助工程师对bug进行分拣。至少做到将bug及时分发到对应的小组手上,从而节省各个团队的的时间。
分拣bug时往往需要一些基本的决策树,比如,如果看到了某种现象,那么bug的原因就一定是A或B。再根据另一种现象,可以推断出一定是B。随着代码不断更新,这个决策树也需要不断更新。
Bug分拣之后,要对bug的重要等级进行排序。并不是所有的bug都需要马上被修正。根据团队在当下阶段的主要目标,比如该季度中自动驾驶车左转的bug最为重要,就要把和左转有关的bug找出来,视为priority 1。
第三阶段:Bug追根溯源
Bug分配到正确的团队的手上之后,就需要被追根溯源,看看根本问题到底出现在哪里。越复杂的bug牵扯出来的问题就会越多,根本原因也埋得越深,修正所需要的时间也越长。
针对相对容易的bug,效率就是一切。如果容易的bug都修复不了,就会拖其他复杂bug的后腿,bug越积越多,最终造成恶性循环。因此,团队必须在控制代码质量的基础上,遵守定时修复bug的流程。
因为一些bug修正起来太困难,所以很多团队会选择进行“热修复”,即hotfix,而不去从根本上解决问题。Hotfix什么时候该用,什么时候不该用,也需要各个团队做到统一。否则代码的核心质量无法保证。
其实,很多bug的根本问题不在于技术本身,而在于公司团队的组织架构设计不合理,或是高层的技术决策出现失误。团队的领导者要认清事实,敢于及时止损。
-
RFID在物流智能分拣中的应用2025-07-21 758
-
OTDR测试中常遇到的问题及解决2024-12-31 3204
-
常见的PLC系统BUG有哪些?如何减少BUG的产生呢?2023-10-31 1852
-
如何解决电压测试遇到的问题2023-10-30 1924
-
浅谈RTL中常见的bug2023-07-15 1921
-
窄带分拣机在物流自动分拣设备中的作用2022-11-10 5678
-
lwip网路组件中的测试实例出现bug2022-04-01 3025
-
如何有效的降低测试中的噪声?2021-05-07 2105
-
数据测试:UI测试常见BUG2020-06-29 3230
-
iOS13个人热点BUG有望在iOS 13.4正式版中修复2020-03-23 4224
-
基于STM32和机智云iot开发平台的水果分拣系统提高分拣效率2020-01-02 2990
-
进行编码、测试和调试三个阶段时如何减少bug2019-02-11 3874
-
智慧分拣高精度定位管理系统2018-11-29 5082
-
浅谈iOS9.3更新出现的Bug2017-10-11 623
全部0条评论

快来发表一下你的评论吧 !
