

采用NB-IOT通信技术的泊车位传感器节点设计方案
电子说
描述
目前,国内外主要采用感应线圈、视频分析、红外感应和无线地磁感应等停车位检测技术。有学者提出采用433M无线通信技术进行车位数据的传输,并通过4G 通信将停车场各车位的信息上报网络平台,该方案的局 限在于增加了系统的复杂度以及限制了下挂数量。也有国外学者提出利用智能手机和通信网络实现停车位管理的方案,通过手机自带的传感器判断车辆在停车场内的行驶状态,利用蜂窝网络结合停车场分布的WI-FI信号对车辆停放的具体车位进行定位,在网络平台上进行统一管理和计费,该方案由于定位精度低,对停放车辆的间距要求大,不利于实际应用。
在物联网技术迅猛发展的背景下,笔者设计并实现了一种采用 NB-IOT 无线通信技术和三轴磁力检测技术的泊车位传感节点,该泊车位传感节点具有架设方便、下挂数量大和检测灵敏等特点。
1 系统结构
泊车位检测系统的总体结构如图1所示,该系统总体分为感知层、通信传输层和应用层。感知层:在各车位上部署了采用 NB-IOT 通信技术的泊车位传感器节点,负责采集车位当前的磁场数据,通过分析磁场数据得到当前车位的状态,并将车位状态信息通过 NB-IOT 模组,发送到 NB-IOT 基站;通信传输层:主要承担 NB-IOT 节点的链路分配以及车位管理数据的收发任务,并提供相应服务的接口供泊车位管理系统调用;应用层:基于 B/S架构的泊车位管理系统服务器部署于云端,通过 NB-IOT平台提供的接口与各车位传感节点进行交互,用户可以通过手机、PC机等终端设备查看和管理车位的实时状态。
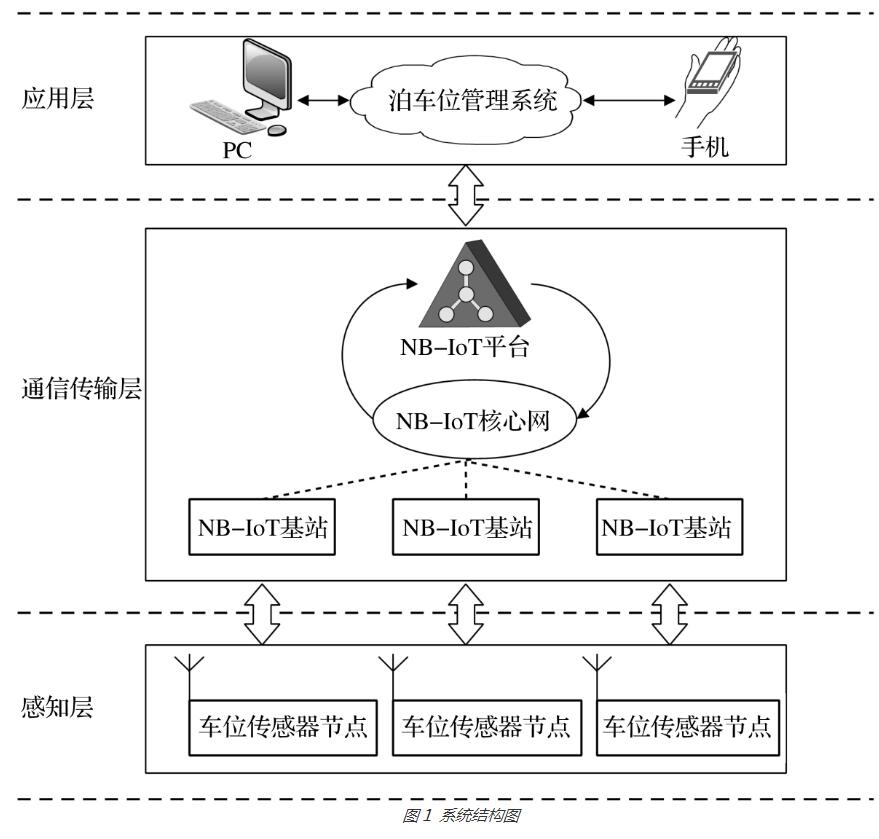
图1 系统结构图
WSN 环境下泊车位传感器节点的设计,通信方式上采用 NB-IOT 通信技术,中文名窄带物联网,NB-IOT 通信技术是物联网领域的新兴技术,具有覆盖能力强、超低功耗、部署成本低廉、下挂数量大、无需额外架设网关或集中器等特点,检测方式上采用基于 MEMS封装技术的三轴磁力传感器,该传感器功耗低,检测灵敏,不易受到天气、空气湿度等环境因素的影响,具有体积小巧、部署方便的特点,可以有效避免自行车、电动车等非机动车辆及行人的干扰。
2车位检测原理
地球磁场是一个平均强度较为恒定的弱磁场, 在没有施加外部磁场的情况下,地球磁场的数值会在某一个数值上下缓慢地变化。当有铁磁性的物体进入磁场的时候,由于磁性物体的作用,物体周围的地磁场会发生一定的扰动。而车辆是具有大量金 属的铁磁物体,测试结果验证:汽车的发动机部位、前轴部分和后轴部分的金属密度最大,能够引起的 磁场扰动也最为显着。
本设计采用基于AMR检测技术的三轴磁力传感器,在芯片的内部各个轴向封装了对磁场变化十分敏感的由铁镍合金组成的电桥电路,可以同时检测 X,Y,Z 轴方向上的磁场变化。若车位传感器放置于车辆的下方,并以 Z 轴朝上,一旦有车辆驶入车位,Z 轴朝向上的磁场变化最为明显,因此可主要考察Z 轴磁场数据的变化,并以其他轴向磁场变化作为辅助来判断当前车位的状态。
图2(a)显示车辆驶入车位时引起传感器上方Z轴磁场变化的测试曲线,图2(b)显示车辆驶离车位时引起传感器上方 Z 轴磁场变化的测试曲线。由测试结果可知:车辆驶入和离开停车位的过程中,Z轴的变化是一个较为规律且近似可逆的动态过程。
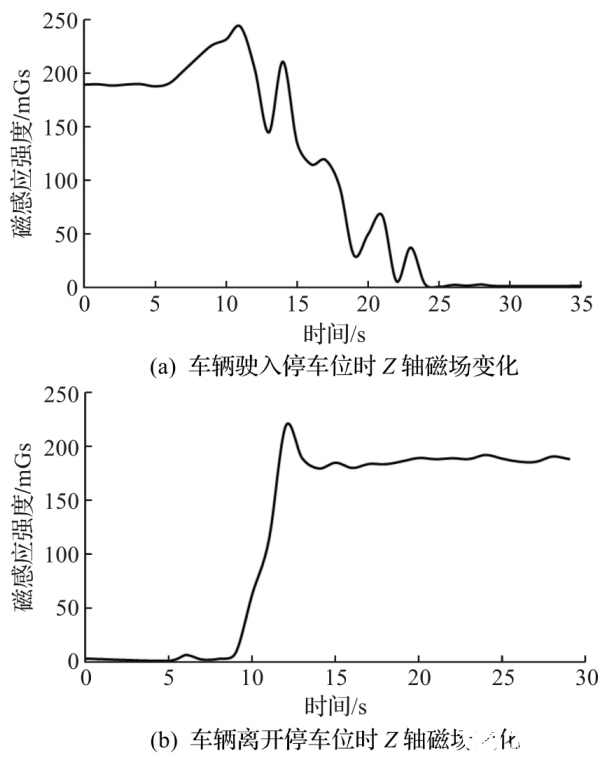
图2 车辆动作引起的磁场扰动测试结果
3 车位传感器节点电路设计
车位传感器节点主要由微控制器(MCU)、三轴磁力传感芯片、存储芯片、NB-IOT 模组、NB-SIM 卡、外置 PCB天线以及锂电池七部分组成。三轴磁力传感器芯片作为传感器节点的感知部分,负责车位磁场检测,并通过内置的 A/D 转换模块将磁阻电路感应到的电信号转换为数字信号,通过SPI接口与 MCU 进行数据交互,同时三轴磁力传感器芯片可以通过中断输出引脚 及DRDY 引脚来唤醒 MCU,提醒 MCU 有新的磁场数 据生成或磁场变化超出设定的阈值。MCU 电路是整个传感器节点的中心部分,主要负责进一步处理由SPI接口发送过来的三轴磁场数据,通过这些数据判断所 在车位的车辆占用情况以及传感节点的低功耗配置, 同时 MCU 通过 USART 串口与 NB-IOT 通信模组通信,发送相应的 AT 指令控制泊车位数据的无线收发以及 NB-IOT 模组的唤醒。NB-IOT 模组、NB-SM 卡以及外置PCB 天线,作为车位传感器节点的通信传输部分,主要负责车位传感器节点与泊车位管理系统之间的通信、泊车位状态信息的发送以及管理系统下发命令的接收,NB-SM 卡为 NB-IOT 模组提供相应的 NB数据流量套餐,为了保证信号接收的强度,选用外置PCB天线,通过天线良好的信号增益和方向性来保证泊车位传感器节点数据的稳定收发。锂电池电源保障传感器节点长时间续航。传感器总体结构框架如图3所示。
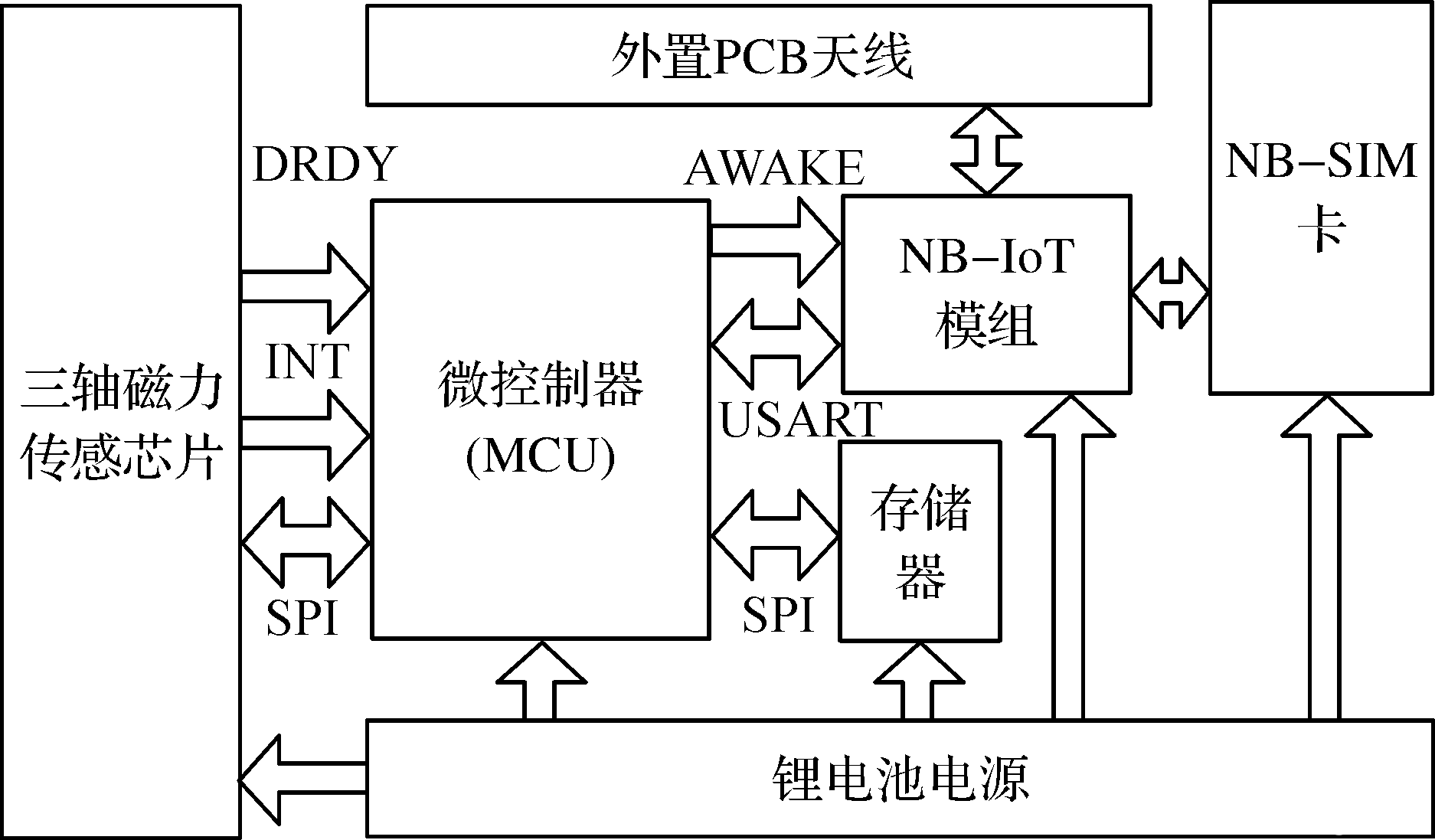
图3 车位传感器硬件结构图
3。1 三轴磁力传感器电路
三轴磁力传感芯片选用ST 公司近年推出的采用 LGA-20封装的高性能超低功耗系列新型独立式微型传感器 LIS3MDL,原理如图4 所示。传感器可测量3 个轴6 个方向上的磁感应强度,数据输出长度为16 位,根据不同的测量需求,测量范围可在±4,±8,±12,±16Gs等4 个档位中选择,支持 I2C 和 SPI两种通讯方式。经过实际测试,测得当配置传感器 ODR 为0.625 Hz,且在超低功耗连续检测模式下运行时,工作电流仅5μA,满足车位传感节点超长续航的工作需求。
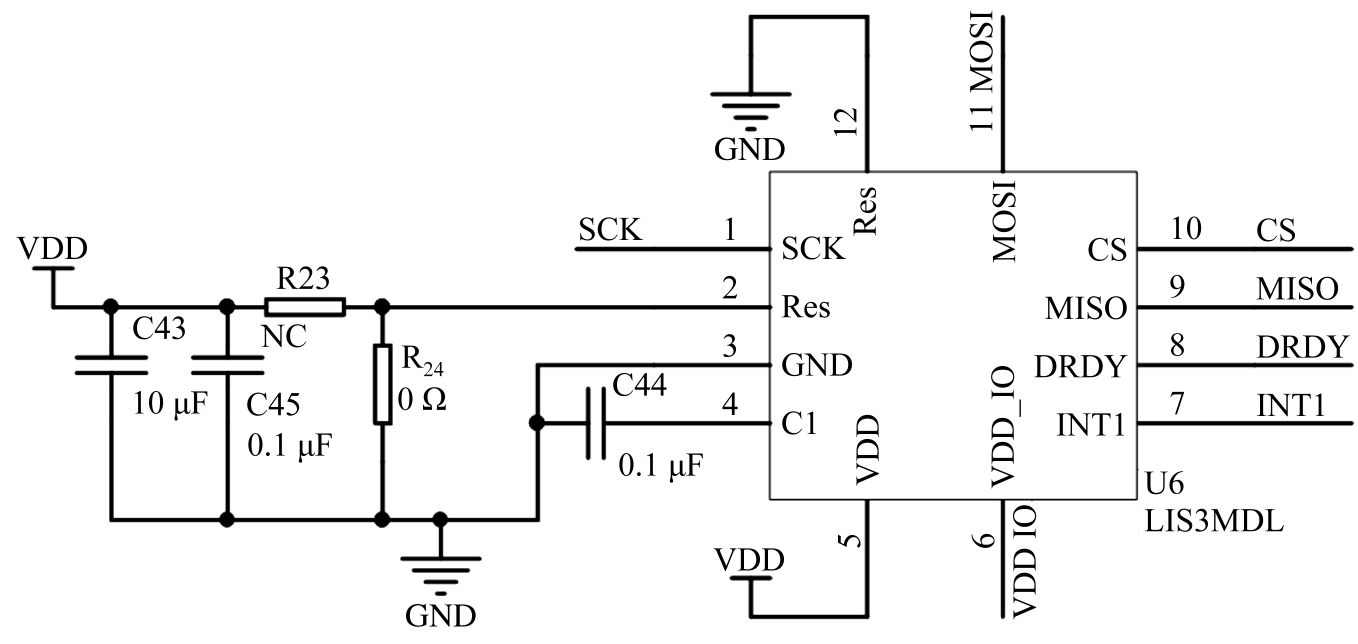
图4 三轴磁力传感器电路图
磁力传感器通过周期性测量停车位区域地磁场的变化来感知铁磁物体的存在,当车辆在地磁传感器附近出现时,磁力传感器模块检测停车位地磁场变化并进行数据采样,并将这些数据通过 SPI接口发送给 MCU 进行处理分析。
3。2 NB-IOT 模组电路
NB-IOT 模组选用 NB05-01 模组,内嵌全球领先的窄带物联网无线通信模块,其原理如图5所示。采用半双工FDD 通讯方式,工作频段为850 MHz,模块符合3GPP 标准中的频段要求,具有体积小、功耗低、传输距离远和抗干扰能力强等特点,在 PSM 模式下运行电流仅5μA。
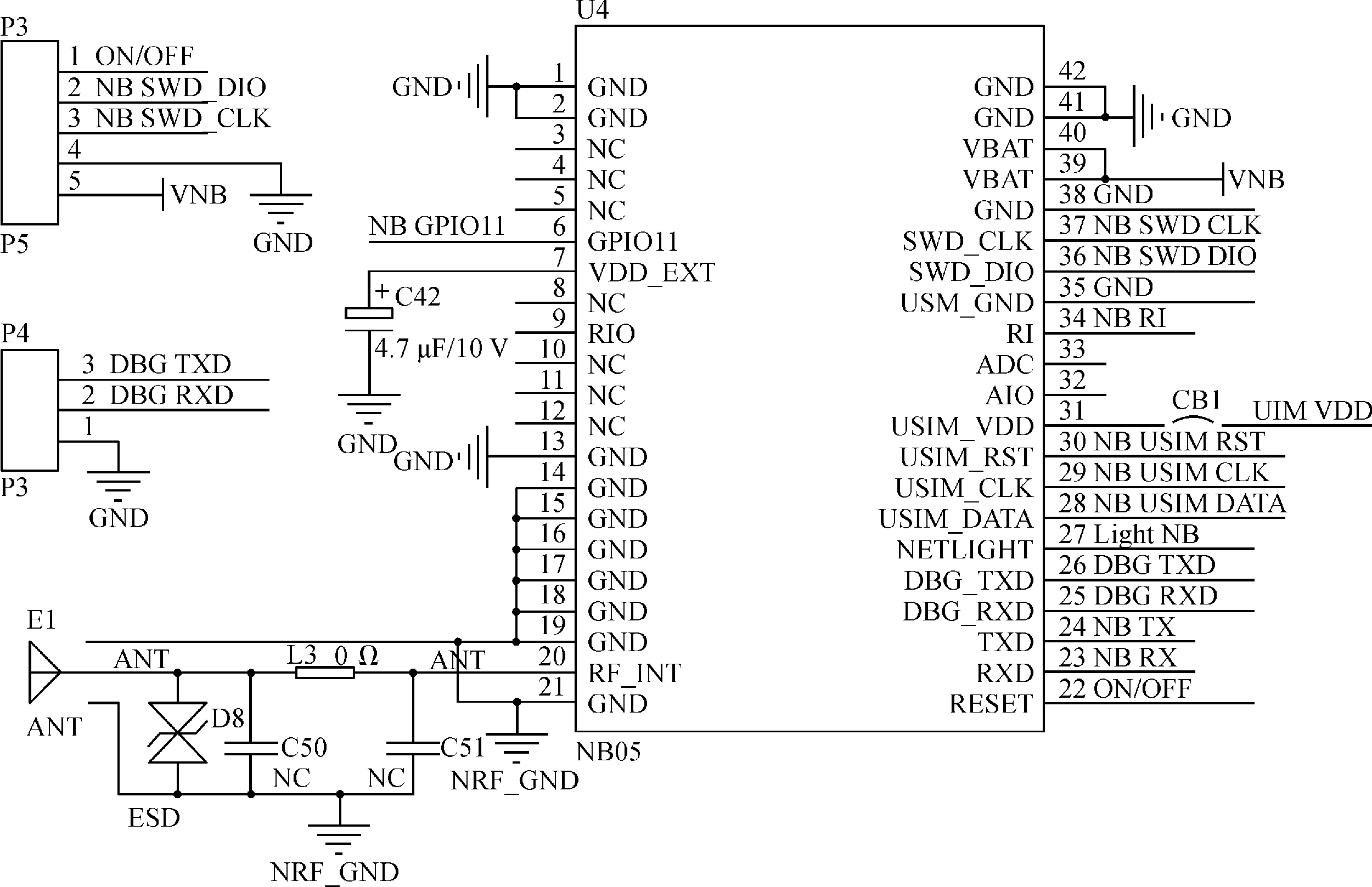
图5 NB-IOT 模组电路图
3。3 NB-SIM 卡座电路
NB 卡使用的是中国电信提供的10649 NB 专用卡,目前主要有插卡和贴片卡两种形式,本设计采用的是 Micro卡座插卡的形式,其原理如图6所示。
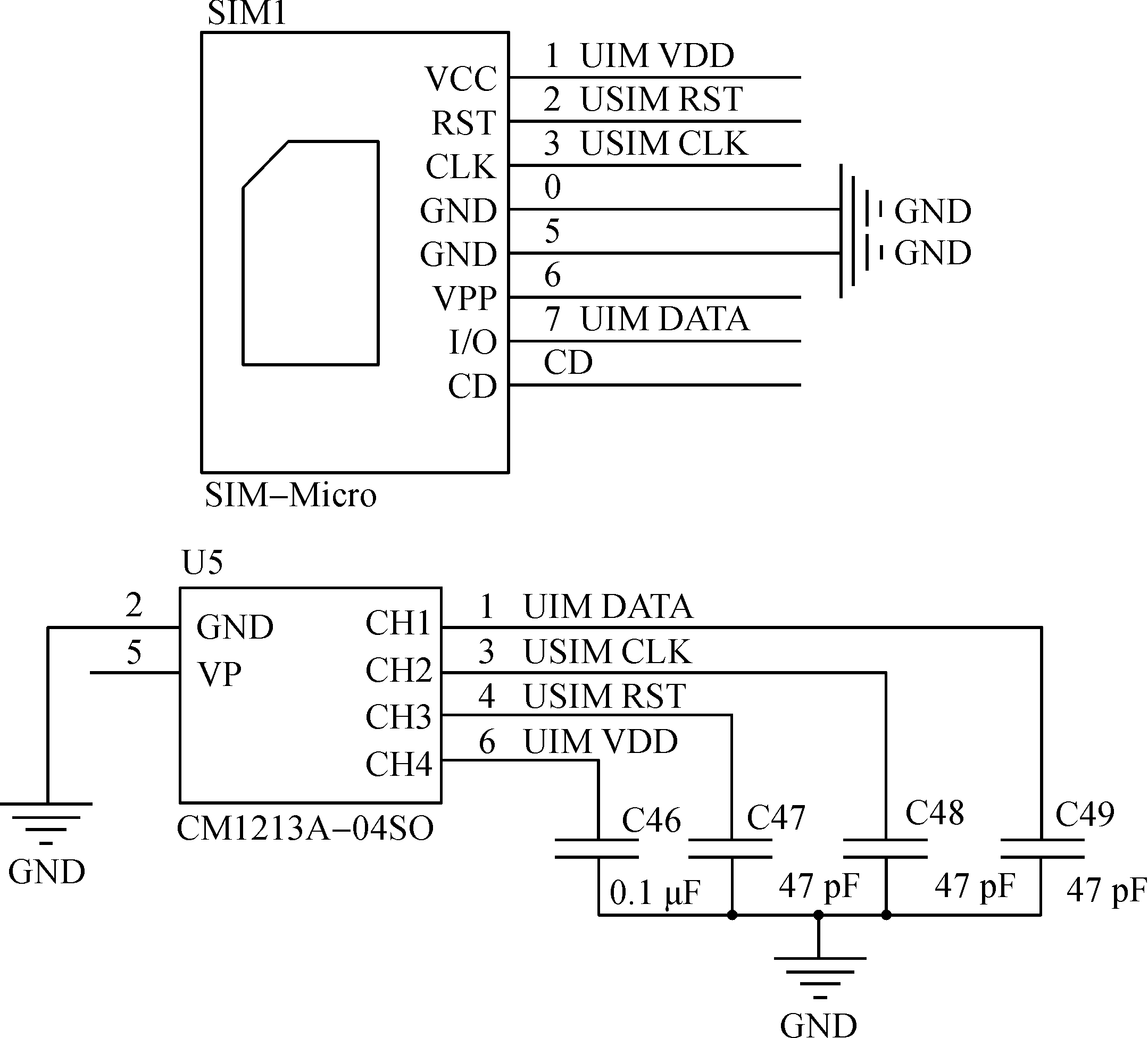
图6 NB-SIM 卡电路图
为保证 NB 卡与 NB-IOT 模组的稳定运行,在卡的各个引脚添加 ESD 防静电保护,ESD 采用 CM1213系列的 TVS管集成芯片,以增强所设计的传感节点通信部分的抗干扰能力。
3。4 MCU 电路
MCU 部分选用 ST 公司推出的的超低功耗系列单片机 STM32L151C8T6,该 MCU 基于 32 位 Cortex-M3内核,低功耗工作模式下电流仅11μA,在低功耗睡眠模式下功耗可低至4.6μA,可胜任车位传感器所需的低功耗设计。MCU 部分电路图如图7所示,该部分主要负责地磁传感器数据的预处理及分析,并结合获取的地磁场数据进行车位状态判断、控制 NB-IOT 模组进行无线数据传输、节点自身状态监测及预警等。
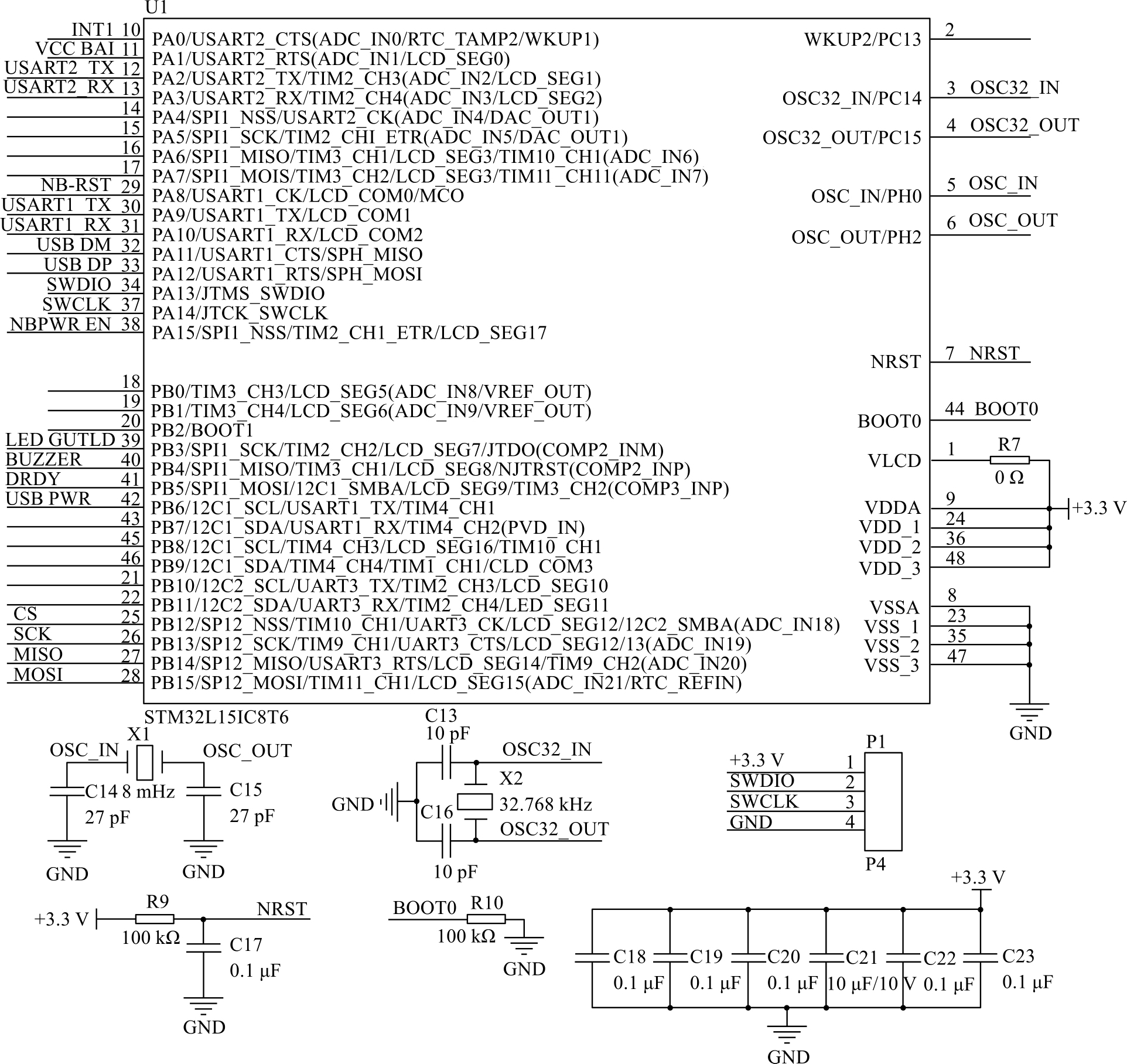
图7 MCU 电路图
3。5 射频天线(RF)电路
天线部分是决定传感节点数据通信效果的关键一环,所设计的 RF走线应满足50 Ω 阻抗匹配,印刷线路板(PCB)走线阻抗因素主要与铜厚、布线宽度、布线间距以及PCB 使用的板材有关,即

式中:εr 为PCB板材的介电常数;t为PCB走线铜的厚度;h为微带线的介质厚度;W 为PCB走线的宽度。由 式(1)可见:PCB走线的阻抗Z 与板材介质厚度成正比,与εr,W 和t成反比。因此,在模组进行PCB设计时也需根据PCB加工厂商的工艺进行设计调整,使天线各部分走线满足50Ω 阻抗匹配。结合PCB厂家的工艺标准,设计出的 RF 走线经仿真验证,结果显示设计能较好满足阻抗匹配的要求,如图8所示。
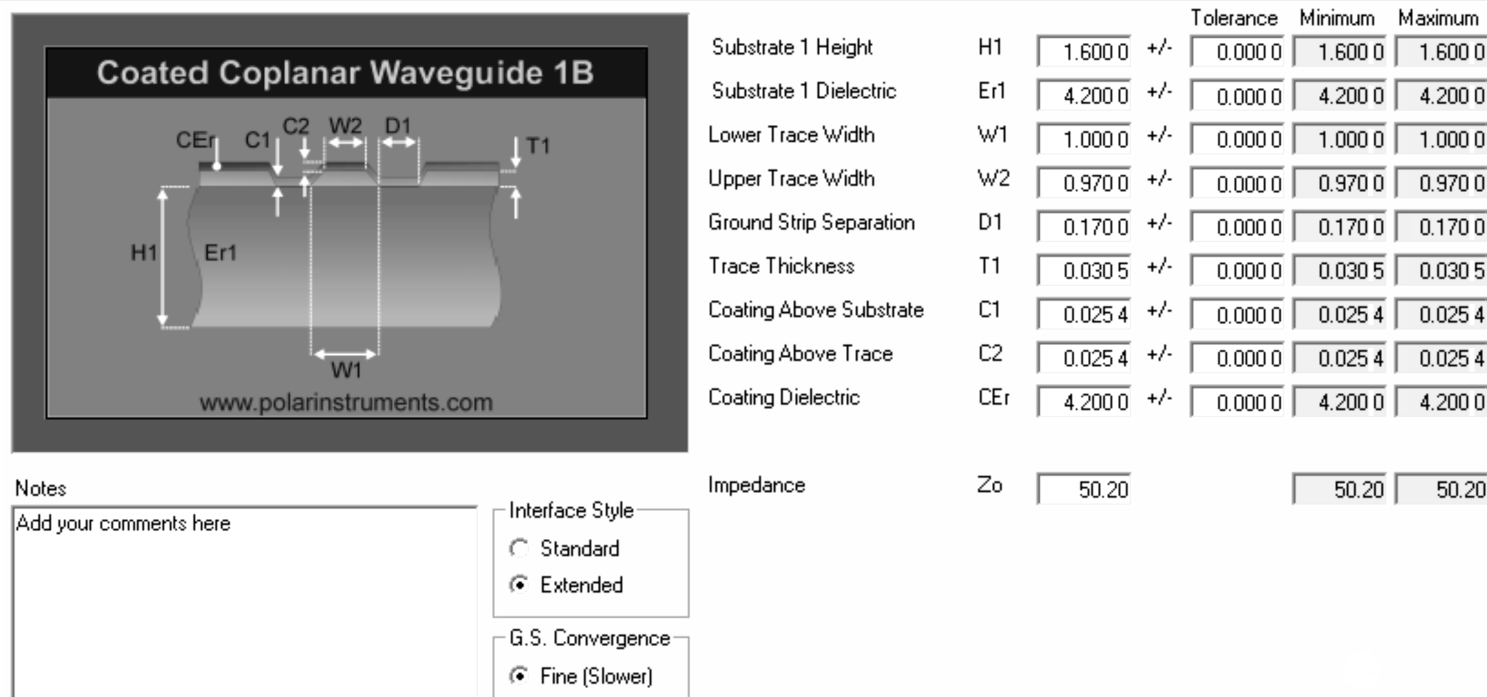
图8 阻抗匹配仿真计算图
3。6 电源电路
DC-DC 稳压芯片采用 SPX3819-3.3 低功耗电源芯片,其原理如图9 所示,为 NB-IOT 模组提供稳定的3.3V 电压,最大输出电流可达500 mA,满足 NB-IOT 模组天线开启时所需的瞬时功耗,静态电流1μA,符合车位传感节点的低功耗设计需求,在输出端并联100μF 大电容,以防止天线开启时工作电流瞬时增大引起的电压跌落,供电引脚端口采用10μF,0.1μF,1nF,100pF 的组合形式以滤过高频信号干扰。
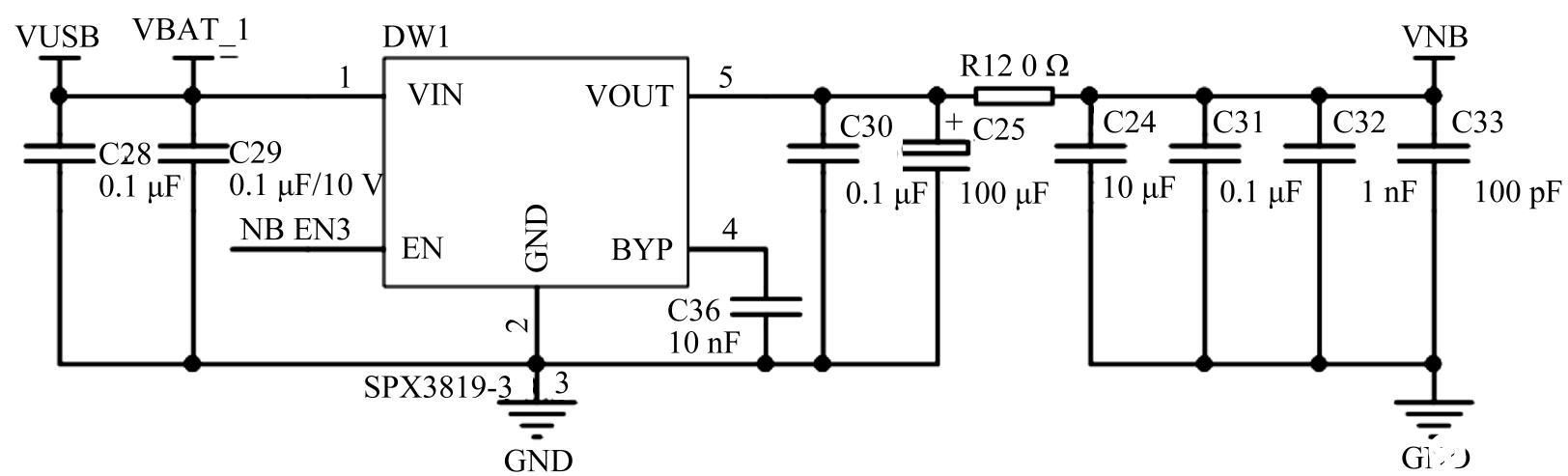
图9 电源电路图
3。7 锂电池充电电路
笔者设计的车位传感节点采用锂电池供电,电路 中预留了锂电池充电电路,以满足锂电池充电需求, 如图10所示。锂电池充电管理芯片选用 TP5100,内置功率 MOS管,工作电流可通过编程控制在0.1~2 A,自带过流过压保护,耐用性强且使用方便。锂电池采用的是电压3.7V,总容量10200mAh的并联式锂电池组,当泊车位没有车辆进出的情况下,传感器长期处于低功耗运行模式,MCU 进入启用 RTC唤醒的 Stop 模式,功耗约为1.6μA。三轴磁传感器在 ODR 为5 Hz的低功耗检测模式下工作,功耗约为15μA。NB-IOT 模组进入 PSM 模式,功耗约为5μA。节点中其他模块如存储芯片在掉电模式下的功耗极低仅1μA,传感器节点在低功耗模式下总功耗约25μA,锂电池组的最大放电量约为标量的70%,因此,在没有车辆进出的理想条件下,可以估算出锂电池理论上最长可以为传感器节点提供285600h即33 年的续航时间。
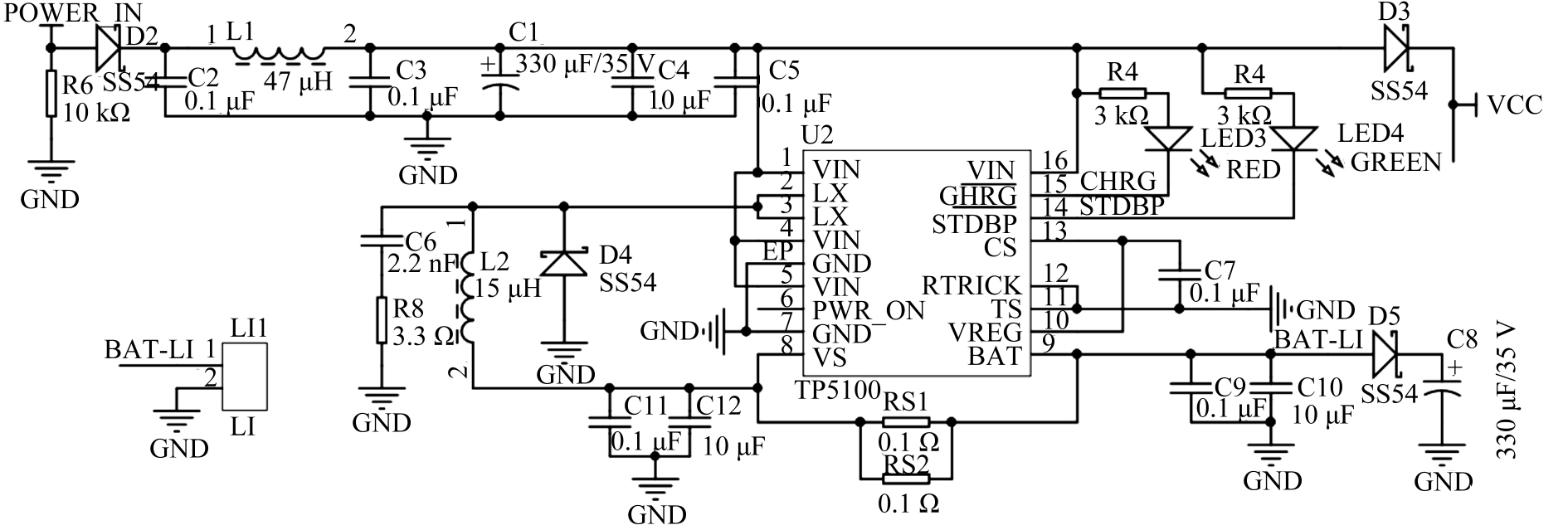
图10 锂电池充电电路图
4 软件设计
软件主程序流程如图11所示,上电时首先进行系统的初始化,完成对 NB-IOT 模组、三轴磁力传感器、MCU 及各项网络参数的配置,NB-IOT 模组的注网过程包括通过相应的 AT 指令对 NB-SIM 卡的有效性、模组频段、网络激活状态、网络注册状态、信号质量和连接状态等环节进行查询验证,以 确保NB-IOT 数据能够正常接收和发送,待 NB-IOT 模组成功注网后,进入泊车位检测流程,MCU 对磁力传感器采集的数据进行分析判断,若车位状态发生了改变,将车位状态信息发送到平台,并进入低功耗模式,若车位状态未发生改变,则直接进入低功耗模 式,当发 生定时中断或传感器发出外部中断时, MCU 唤醒并重新进入泊车位检测流程,如此往复循环。
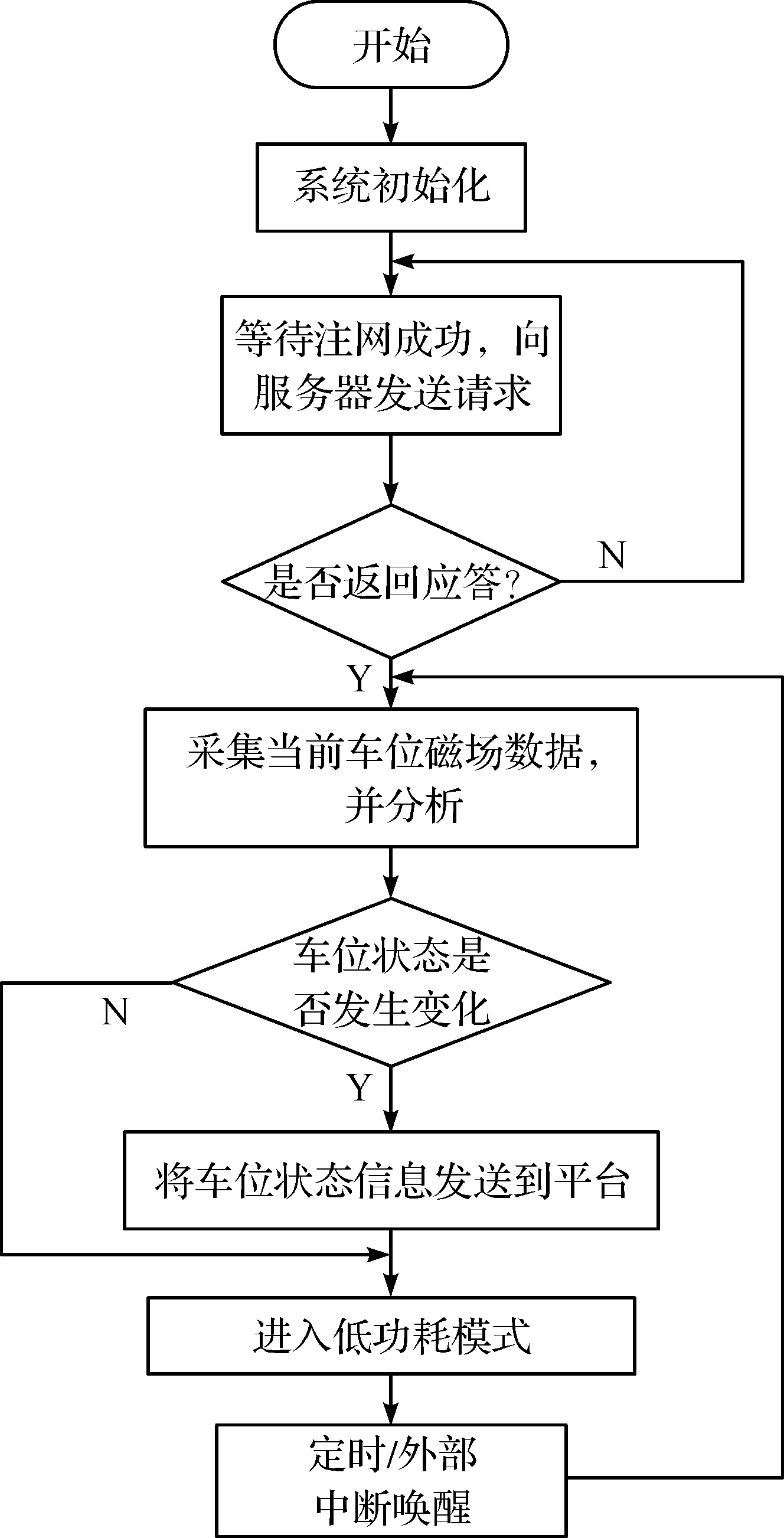
图11 主程序流程图
泊车位检测总体流程如图12所示,主要包含以下几个环节:数据采集,主要负责对磁场进行实时数 据采集;数据滤波,对采集来的实时数据进行过滤, 滤除干扰信号以及毛刺;分析判断,获取到滤处理后 的数据,并根据这些数据分析判断车位的状态并输出;基准线更新,基准线是传感器节点进行车位检测判断的重要依据,磁场受到温度等环境因素的影响会产生微弱的变化,因此在车位空闲的情况下, 对三轴基准数据进行定期的更新,有利于保证车位检测的准确性。
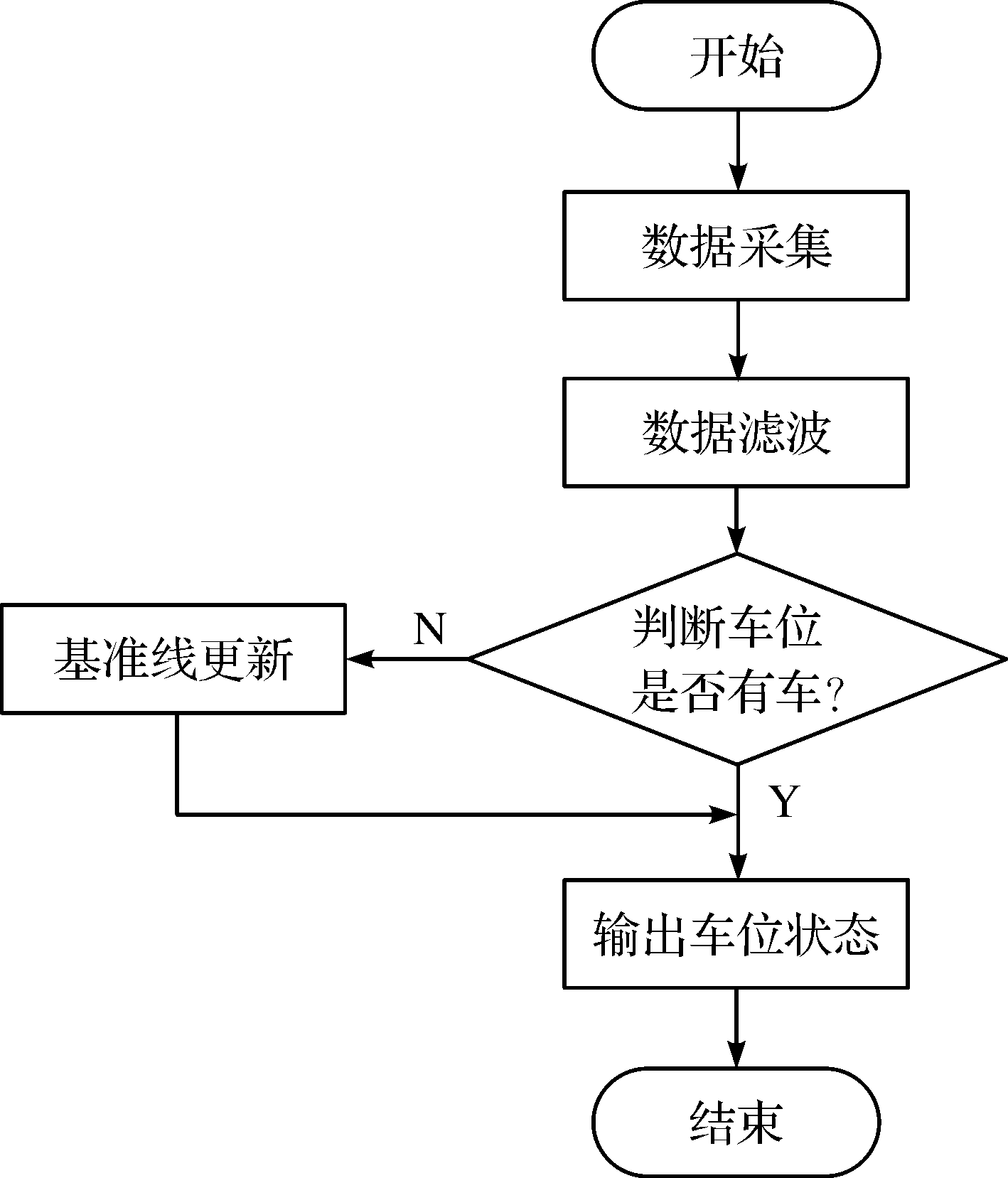
图12 泊车位检测总流程图
本设计所用滤波算法采用中值率波与均值滤波结合的方式进行处理。中值滤波算法的公式为
Y(i)=Med[x(i-n),…,x(i),…,x(i+n)] n∈N (2)
将采样到的一组数据由大到小进行排列,将中间的值作为采样的数值。均值滤波算法为

将获得的一组数据取平均值作为采样的结果, 这两种方法结合可以有效滤除所获取数据的毛刺等干扰。
传感节点发生中断唤醒后开始分析判断车位状态,首先 MCU 处于低功耗待机模式,传感器在低功耗连续检测状态下工作,每秒检测5 次磁场,当传感器检测到Z轴数值大于设定好的阈值时,传感器产生中断唤醒 MCU,具体的中断处理流程如图13所示。
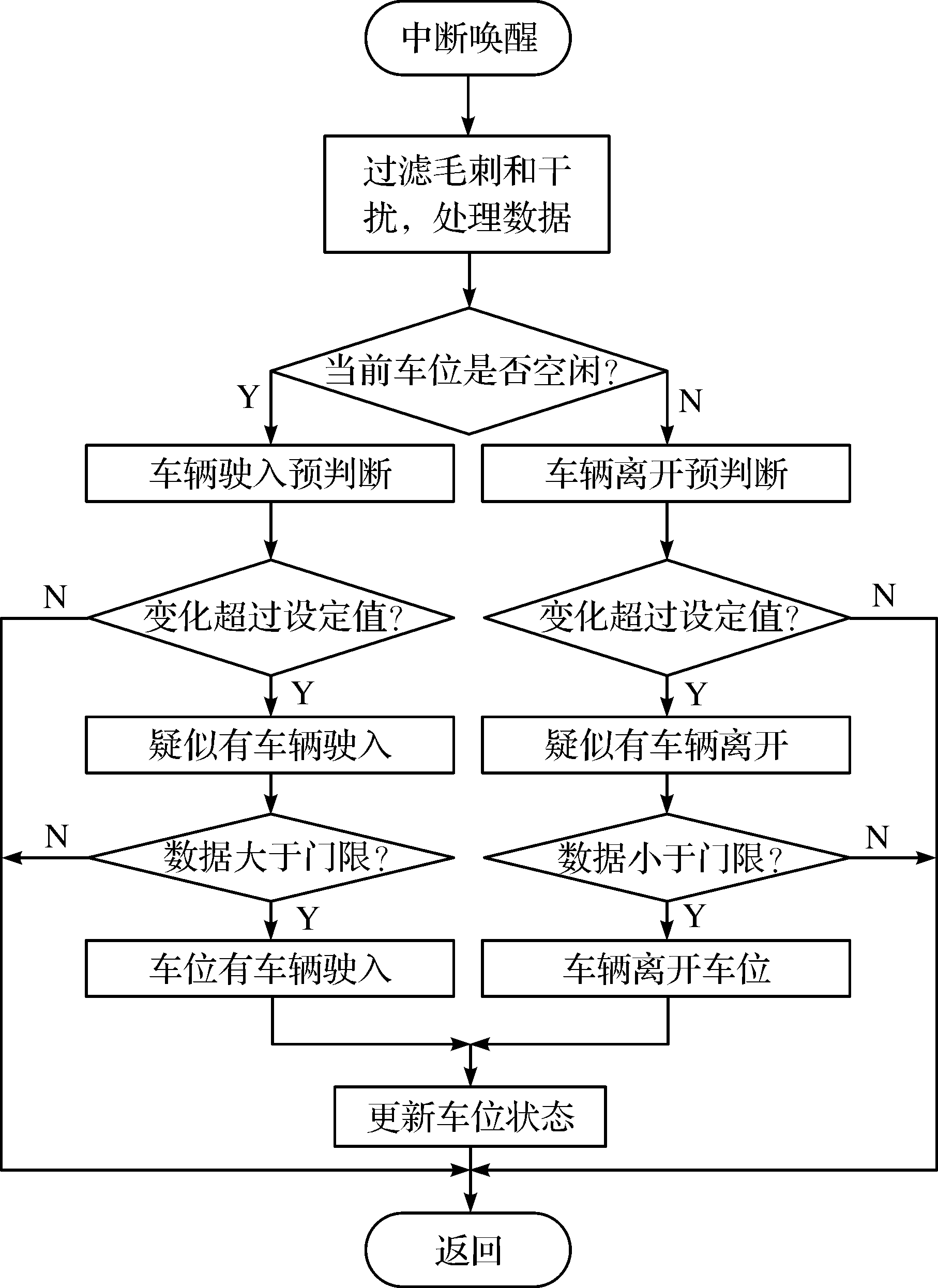
图13 车位状态判断流程图
MCU 唤醒后通过滤波获取并处理数据,根据当前车位是否空闲分两种方向进行车位的判断,主要的判断依据是将车位在空闲状态下获得的磁场基准线与采集的数据进行比较:若车位当前空闲,就判断车位是否是车辆驶入车位,若采集到的数据并没有满足车辆驶入车位的判断条件,则认为引起中断的为干扰事件,传感器节点重新回到低功耗待机状态,等待车辆驶入;若车位已经有车停,则判断车辆是否离开车位,当引起中断的数据没有满足车辆离开的判断条件时,则认为该中断源为干扰,传感器节 点重新回到低功耗检测状态,等待下一次中断产生。
本研究实现的车位传感器节点将选用的 NB- IoT 模组配置在支持 AT 指令的 CoAP 通信模式下,在该工作模式下 NB-IOT 模组可以与支持CoAP通信协议的 NB-IOT 平台进行数据交互,并且 MCU可以通过 USART 串口灵活地发送丰富的 AT 指令对 NB-IOT 模组进行操作。
NB-IOT 模组实时发送泊车位状态的前提是 NB-IOT 模组已经成功注网,以3号泊车位上传车位有车辆驶入的状态信息为例,要上传的格式为长度7 字节的16 进制数据,内容为0301020001FC01,其中第1字节为泊车位地址,第2字节为功能码,代表上传的是泊车位状态,第3 字节表示数据的字节长度,第4,5字节为泊车位状态信息,最后两个字节为 CRC16校验 码。NB-IOT 模组发送泊车位状态的 AT 指令流程如图14所示。
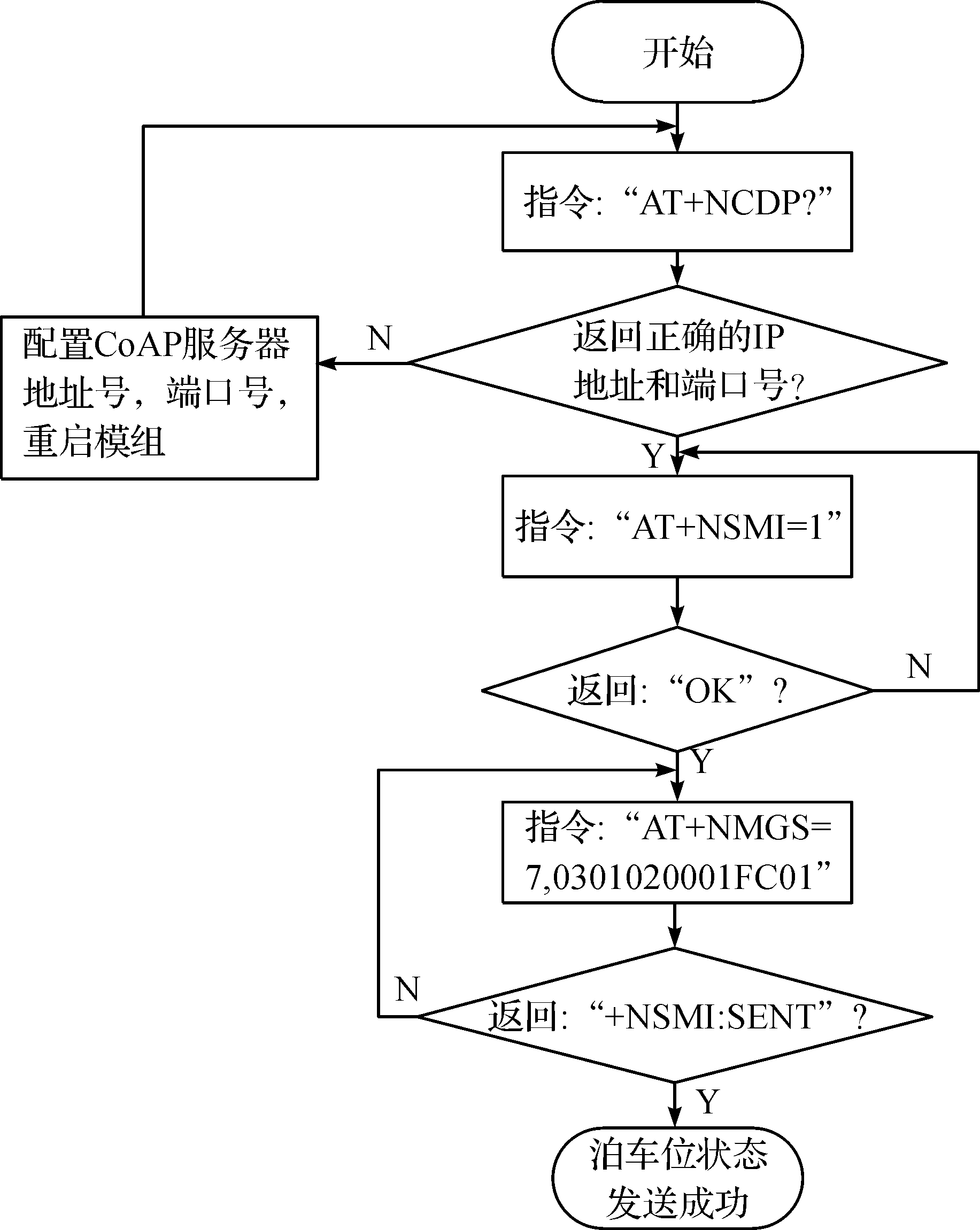
图14 泊车位状态信息发送流程图
首先,向模组发送 NCDP 指令查询模组设置的CoAP 服务器IP 地址号及网络端口号是否正确,若返回的值与所要发送的 NB-IOT 平台不一致,或者返回“ERROR”,则需要给模组配置正确的IP 地址及端口号,重启模组后生效;之后,向模组发送 NS- MI指令,开启模组的“消息发送通知”功能,开启成功后,使用 NMGS指令发送泊车位状态信息,若模组返回“ERROR”,则需要再次发送泊车位状态信息,若发送成功,模组将返回“+NSMI:SENT”告知 MCU信息已经成功发送,至此泊车位状态发送完成。
-
LPWAN家族新贵—NB-IoT的技术难点和行业影响2017-02-21 394768
-
NB-IoT来了!共建NB-IoT生态,拥抱万物互联2017-09-30 3480
-
NB-IOT的OTA测试2017-10-25 7000
-
【NB-IoT分论坛|中国IoT大会】与高通、是德、LitePoint、海思半导体等NB-IoT解决方案全分享!2017-11-16 52178
-
盘点STM32 NB-IoT 物联网解决方案2018-08-08 6375
-
Rainbow NB-IoT软件应用案例:智能停车场车位弱覆盖解决方案2018-09-27 3107
-
NB-IoT技术揭秘 NB-IoT从概念到应用详解2018-12-27 5253
-
什么是NB-IoT技术2020-02-21 3723
-
一篇文章讲清NB-iot技术2020-03-03 2273
-
NB-IoT智能燃气表系统解决方案2020-07-06 4230
-
NB-IoT地磁车位检测器技术方案2020-07-09 4234
-
实现NB-IoT低功耗的方法2020-10-22 2056
-
NB-IoT是什么?NB-IoT能够干什么?2021-07-26 3094
-
NB-IoT的优劣势2022-01-27 1724
-
【技术周刊】通信黑科技之——华为/运营商力挺的NB-IoT2016-09-28 3545
全部0条评论

快来发表一下你的评论吧 !
