

关于Parker MicroStrain传感器测试IMU将产生可处理的现实场景
无线/传感
描述
惯性测量单元(IMU)是越野重型车辆和机械制造商的必不可少的工具。它们提供了关键信息,这些信息可用于控制,监视和管理设备,还可以确保操作人员在使用过程中的安全。
通常,设备和操作员都处于恶劣,不可预测的环境中,容易受到损坏甚至更严重的伤害。这些传感器旨在测量和提供有关力,角速度和方向的实时数据,是设备及其操作员的第一道防线。
在现实环境中测试IMU将产生可处理现实场景的传感器。这就是我们的MicroStrain团队对MV5-AR和ML5-AR工业倾斜和角速度传感器所做的工作。通过使用实际环境和条件,团队能够获得准确的读数,从而有助于验证其设备的性能,从而使其与竞争对手的产品区分开来。
作为测试标准的一部分,我们有超过56个第三方合格标准,其中包括电气,机械,振动和环境标准。我们已经记录了来自真实机器和设备的振动和环境数据,并努力以可重复的方式在测试环境中模拟这些条件。这样做是为了确保IMU传感器的设计能够满足工作中遇到的非常特殊的挑战性条件。
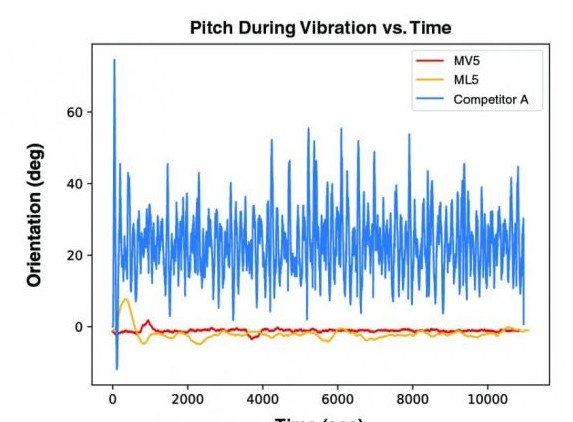
针对竞争对手的传感器测试MicroStrain惯性传感器,该图表显示了这些传感器受到大约8G RMS随机振动的影响。在包含振动的实际环境中使用时,ML5和MV5比竞争对手稳定了几个数量级。
结果,当与其他传感器进行对比测试时,MicroStrain传感器表现得更好。在第一个测试(高振动测试)中,三个传感器(MV5-AR,ML5-AR和竞争对手的传感器)经受了已知的输入振动,该振动是通过实际的现场数据收集的。该团队这样做是为了在测试阶段记录现实情况,同时记录角度测量值。完美的传感器的角度测量读数应为0度。尽管没有一个传感器的读数为零,但两个MicroStrain传感器的读数却接近零,而竞争对手的传感器的读数为20度。竞争对手的传感器指示轴旋转,没有物理运动,导致读数不准确。
针对两个竞争对手的传感器测试了MicroStrain惯性传感器,传感器的旋转角度为+/- 90度。MV5和ML5的性能比某些竞争对手好几个数量级。
在第二个测试(螺距误差测试)中,团队比较了四个传感器-MV5-AR,ML5-AR和两个竞争对手的传感器。所有设备均在可用的测量范围内旋转,目的是在报告相似角度的角度时显示出最小的角度差异。理想的传感器在整个范围内都不会出现错误,但是团队发现两个竞争对手的传感器都有明显的错误,而MV5和ML5的错误却很小。
结果非常清晰:在真实环境中进行测试使Parker MicroStrain传感器与众不同,并且OEM想要保护其设备和操作员的理想选择,更多信息尽在振工链。
责任编辑:pj
-
基于IMU和地磁传感器的导航系统设计2020-04-18 4574
-
浅谈Arduino Nano 33系列的IMU传感器2021-01-13 7528
-
基于MEMS传感器的虚拟现实参观系统2018-11-05 2953
-
基于IMU传感器创建精确的倾角仪选型2019-02-15 2673
-
ST是否为博世BMI160的IMU传感器提供传感器融合库?2019-04-26 3695
-
美国 MicroStrain陀螺仪 3DM-GX5-252020-04-13 1164
-
3DM-GX5-15 惯性测试单元IMU2020-12-07 835
-
MicroStrain 3DM-GX5-25陀螺仪2020-12-09 796
-
IMU 3DM-GX5-252020-12-16 865
-
IMU角度传感器PCB布局问题2022-04-08 4106
-
基于IMU和地磁传感器的捷联惯导系统2019-04-15 8865
-
美国MicroStrain微型惯性传感器2020-08-14 5879
-
姿态传感器和IMU的联系和区别2022-02-15 3987
-
什么是IMU传感器 IMU传感器在自动驾驶汽车的关键应用2023-10-25 8741
全部0条评论

快来发表一下你的评论吧 !
