

SUSAN特征检测的基本原理和算法的性能和应用研究
描述
(文章来源:现代电子技术,作者:马桂珍 , 房宗良 , 姚宗中 )
1 引 言
边缘是图像最基本的特征,是图像分割的第一步。经典的边缘检测方法如:Roberts,Sobel,Prewitt,Kirsch,Laplace等方法,基本都是对原始图像中象素的小邻域构造边缘检测算子,进行一阶微分或二阶微分运算,求得梯度最大值或二阶导数的过零点,最后选取适当的阀值提取边界。由于这些算法涉及梯度的运算,因此均存在对噪声敏感、计算量大等缺点。在实践中,发现SUSAN算法只基于对周边象素的灰度比较,完全不涉及梯度的运算,因此其抗噪声能力很强,运算量也比较小。并将SUSAN算法用于多类图像的边缘检测中,实验证明该算法非常适合含噪图像的边缘检测。
2 SUSAN边缘检测简介
2.1 SUSAN特征检测原理
如图1所示,用一个圆形模板在图像上移动,若模板内象素的灰度与模板中心象素(称为:核Nucleus)灰度的差值小于一定阀值,则认为该点与核具有相同(或相近)的灰度,由满足这样条件的象素组成的区域称为USAN(Univalue Segment Assimilating Nucleus)。
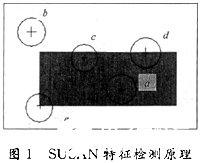
当圆形模板完全处在图像或背景中时,USAN区域面积最大(如图1中的a和b);当模板移向图像边缘时,USAN区域逐渐变小(如图1中c);当模板中心处于边缘时,USAN区域很小(如图1中的d);当模板中心处于角点时,USAN区域最小(如图1中的e)。可以看出,在边缘处象素的USAN值都小于或等于其最大值的一半。因此,计算图像中每一个象素的USAN值,通过设定一个USAN阀值,查找小于阀值的象素点,即可确定为边缘点。
2.2 SUSAN边缘检测算法
(1)算法描述
对整幅图像中的所有象素,用圆形模板进行扫描,比较模板内每一象素与中心象素的灰度值,通过与给定的阀值比较,来判别该象素是否属于USAN区域,如下式:

式(1)中c(r,r0)为模板内属于USAN区域的象素的判别函数;I(r0)是模板中心象素(核)的灰度值;I(r)为模板内其他任意象素的灰度值;t是灰度差门限。
图像中每一点的USAN区域大小可用下式表示:

式(2)中D(r0)为以r0为中心的圆形模板区域。得到每个象素的USAN值n(r0)以后,再与预先设定得门限g进行比较,当n(r0)
(2)模板的选取
由于图像的数字化,实际上无法实现真正的圆形模板,所以都是采用近似圆代替。但是模板较小时,如果门限选取不恰当,可能会发生边缘点漏检的情况。模板也不宜取得太大,否则会增大运算量大,通常可取5×5或37象素模板。本文实验中均采用的是5×5的模板。
(3)门限t,g的确定
门限g决定了边缘点的USAN区域的最大值,即只要图像中的象素的USAN值小于g,该点就被判定为边缘点。g过大时,边缘点附近的象素可能作为边缘被提取出 为模板的最大USAN值),可以较好地提取出初始边缘点。如果要达到单象素的精度,还需进一步剔除多余象素。
为模板的最大USAN值),可以较好地提取出初始边缘点。如果要达到单象素的精度,还需进一步剔除多余象素。
门限t表示所能检测边缘点的最小对比度,也是能忽略的噪声的最大容限。t越小,可从对比度越低的图像中提取特征。因此对于不同对比度和噪声情况的图像,应取不同的t值。
3 实 验
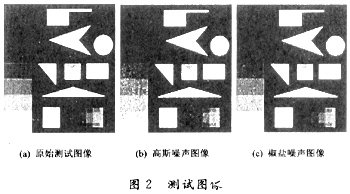
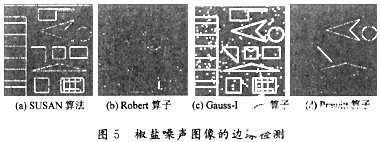
在主频2.3 GHz,内存256 MB的PC机上,分别对SUSAN算法(t=10,g=18)和传统的Robert算子、Gauss-Laplace算子、Prewitt算子,采用Visal C++编程,对图2中的3幅灰度测试图像进行边缘检测。图2中(a)是原始测试图像,(b)是加入高斯噪声(μ=0,σ=0.005)的测试图像,(c)是加入椒盐噪声(ρ=O.005)的测试图像。图3~图5分别是对图2中(a)~(c)三幅图像的边缘检测结果。
4 性能比较与分析
由实验结果可以看出,SUSAN算法具有以下优良性能:
4.1边缘检测效果好
无论对直线,还是曲线边缘,SUSAN算法基本上可以检测出所有的边缘,检测结果较好。虽然实验中没有达到一个象素的精度,但这主要是因为对边缘的两侧都应用了SUSAN算法,对具体的实际应用,可以对背景不再应用SUSAN算法,这样不但可以达到细化边缘的目的,而且运算量也大大减少。

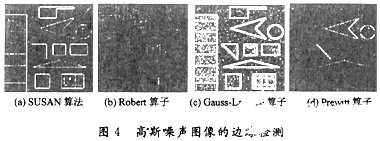
而Robert算子和Prewitt算子对部分直线边缘不能检测出来,圆的边缘也有部分漏检情况;Gauss-Laplace算子虽然基本上可以检测出所有边缘,但是他的定位效果较差,边缘象素较宽。
4.2抗噪声能力好
由于USAN的求和相当于求积分,所以这种算法对噪声不敏感,而且SUSAN算法不涉及梯度的计算,所以该算法抗噪声的性能很好。很明显,如果考虑有独立同分布的高斯噪声,只要噪声小于USAN函数的相似灰度门限值,噪声就可被忽略。对局部突变的孤立噪声,即使噪声的灰度与核相似,只要局部USAN值小于门限g,也不会对边缘检测造成影响。因此SUSAN边缘检测算法可以用于被噪声污染的图像的边缘检测。
而其他的边缘检测算法,Robert算子、Prewitt算子、Gauss-Laplace算子,以及应用广泛的Canny算子,由于这些算法都涉及一阶梯度,甚至二阶梯度的计算,所以他们的抗噪声能力较差[2-5],图4、图5也证明了这一结论。
4.3算法使用灵活
使用控制参数t和g,可以根据具体情况很容易地对不同对比度、不同形状的图像通过设置恰当的t和g进行控制。比如图像的对比度较大,则可选取较大的t值,而图像的对比度较小,则可选取较小的t值。所以这种算法非常适用于对某些低对比度图像或目标的识别。
4.4运算量小,速度快
对1幅256×256的图像,应用SUSAN算法进行计算,对每一点只需做8次加法运算,共需要做256×256×8次加法。
而对于其他的经典的边缘检测算法,如果采用欧式距离作为梯度算子,Sobel算子采用两个3×3的模板,对每一点需要做9次加法,6次乘法,以及1次开方运算,则共需要做256×256×9次加法运算和256×256×6次乘法运算,以及256×256次开方运算。对Gauss-Laplace算子、Priwitt算子以及Canny算子计算量就更大。
4.5 可以检测边缘的方向信息
SUSAN算法实际上还可以检测边缘的方向信息。具体算法是,对每一个检测点计算模板内与该点灰度相似的象素集合的重心,检测点与该重心的连线的矢量垂直与这条边缘。
5 结 语
SUSAN边缘检测算法直接利用图像灰度相似性的比较,而不需计算梯度,具有算法简单、定位准确、抗噪声能力强等特点。因此,非常适于含噪图像或低对比度灰度图像的边缘检测。如果进一步减小门限g的数值,SUSAN算法还可以用于角点的检测。
责任编辑:gt
-
基于级联分类器的人脸检测基本原理2025-10-30 261
-
FFT的基本原理及算法结构2009-06-14 87395
-
DDS基本原理及性能特点2011-07-13 7674
-
遗传算法的基本原理2018-01-07 1962
-
电流检测电阻的基本原理2021-01-29 2761
-
什么是SUSAN边缘检测?SUSAN算法具有哪些优良性能?2021-05-14 2181
-
视频增强算法的基本原理是什么?2021-06-03 1537
-
PID算法基本原理及其执行流程2021-12-21 1268
-
嵌入式系统中语音算法的基本原理是什么2021-12-23 1771
-
LSB算法的基本原理2008-12-09 8215
-
声发射检测的基本原理2009-10-22 5994
-
扩展Prony算法在电力系统非整次谐波检测中的应用研究2016-12-28 1071
-
直接转矩控制的基本原理和仿真研究2017-01-21 832
-
蚁群算法的基本原理及其改进算法.ppt2018-04-23 1489
-
虚拟仪器的基本原理、主要结构和性能特点及国内外研究现状分析2018-09-19 5496
全部0条评论

快来发表一下你的评论吧 !
