

深度学习在计算机视觉上的四大应用
电子说
描述
深度学习在计算机视觉上的应用
计算机视觉中比较成功的深度学习的应用,包括人脸识别,图像问答,物体检测,物体跟踪。
人脸识别:
这里说人脸识别中的人脸比对,即得到一张人脸,与数据库里的人脸进行比对;或同时给两张人脸,判断是不是同一个人。
这方面比较超前的是汤晓鸥教授,他们提出的DeepID算法在LWF上做得比较好。他们也是用卷积神经网络,但在做比对时,两张人脸分别提取了不同位置特征,然后再进行互相比对,得到最后的比对结果。最新的DeepID-3算法,在LWF达到了99.53%准确度,与肉眼识别结果相差无几。
图片问答问题:
这是2014年左右兴起的课题,即给张图片同时问个问题,然后让计算机回答。比如有一个办公室靠海的图片,然后问“桌子后面有什么”,神经网络输出应该是“椅子和窗户”。
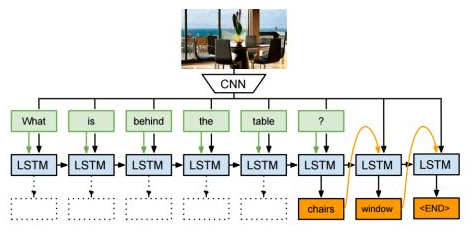
这一应用引入了LSTM网络,这是一个专门设计出来具有一定记忆能力的神经单元。特点是,会把某一个时刻的输出当作下一个时刻的输入。可以认为它比较适合语言等,有时间序列关系的场景。因为我们在读一篇文章和句子的时候,对句子后面的理解是基于前面对词语的记忆。
图像问答问题是基于卷积神经网络和LSTM单元的结合,来实现图像问答。LSTM输出就应该是想要的答案,而输入的就是上一个时刻的输入,以及图像的特征,及问句的每个词语。
物体检测问题:
① Region CNN
深度学习在物体检测方面也取得了非常好的成果。2014年的Region CNN算法,基本思想是首先用一个非深度的方法,在图像中提取可能是物体的图形块,然后深度学习算法根据这些图像块,判断属性和一个具体物体的位置。
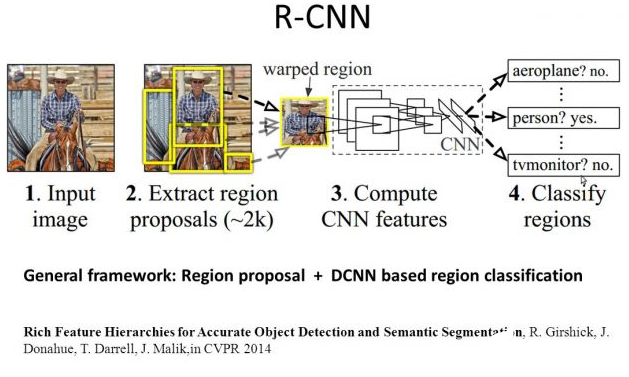
为什么要用非深度的方法先提取可能的图像块?因为在做物体检测的时候,如果你用扫描窗的方法进行物体监测,要考虑到扫描窗大小的不一样,长宽比和位置不一样,如果每一个图像块都要过一遍深度网络的话,这种时间是你无法接受的。
所以用了一个折中的方法,叫Selective Search。先把完全不可能是物体的图像块去除,只剩2000左右的图像块放到深度网络里面判断。那么取得的成绩是AP是58.5,比以往几乎翻了一倍。有一点不尽如人意的是,region CNN的速度非常慢,需要10到45秒处理一张图片。
② Faster R-CNN方法
而且我在去年NIPS上,我们看到的有Faster R-CNN方法,一个超级加速版R-CNN方法。它的速度达到了每秒七帧,即一秒钟可以处理七张图片。技巧在于,不是用图像块来判断是物体还是背景,而把整张图像一起扔进深度网络里,让深度网络自行判断哪里有物体,物体的方块在哪里,种类是什么?
经过深度网络运算的次数从原来的2000次降到一次,速度大大提高了。
Faster R-CNN提出了让深度学习自己生成可能的物体块,再用同样深度网络来判断物体块是否是背景?同时进行分类,还要把边界和给估计出来。
Faster R-CNN可以做到又快又好,在VOC2007上检测AP达到73.2,速度也提高了两三百倍。
③ YOLO
去年FACEBOOK提出来的YOLO网络,也是进行物体检测,最快达到每秒钟155帧,达到了完全实时。它让一整张图像进入到神经网络,让神经网络自己判断这物体可能在哪里,可能是什么。但它缩减了可能图像块的个数,从原来Faster R-CNN的2000多个缩减缩减到了98个。
同时取消了Faster R-CNN里面的RPN结构,代替Selective Search结构。YOLO里面没有RPN这一步,而是直接预测物体的种类和位置。
YOLO的代价就是精度下降,在155帧的速度下精度只有52.7,45帧每秒时的精度是63.4。
④ SSD
在arXiv上出现的最新算法叫Single Shot MultiBox Detector,即SSD。
它是YOLO的超级改进版,吸取了YOLO的精度下降的教训,同时保留速度快的特点。它能达到58帧每秒,精度有72.1。速度超过Faster R-CNN 有8倍,但达到类似的精度。
物体跟踪
所谓跟踪,就是在视频里面第一帧时锁定感兴趣的物体,让计算机跟着走,不管怎么旋转晃动,甚至躲在树丛后面也要跟踪。
深度学习对跟踪问题有很显著的效果。是第一在线用深度学习进行跟踪的文章,当时超过了其它所有的浅层算法。
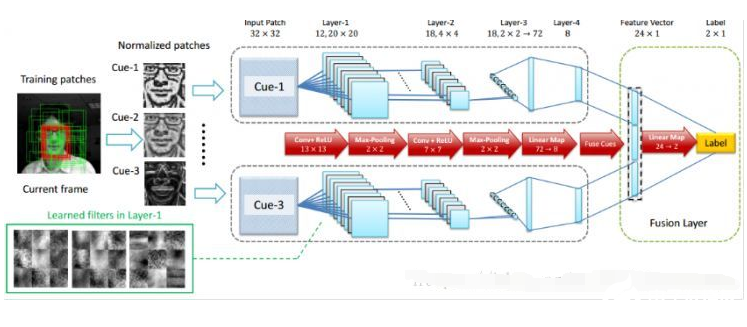
今年有越来越多深度学习跟踪算法提出。去年十二月ICCV 2015上面,马超提出的Hierarchical Convolutional Feature算法,在数据上达到最新的记录。它不是在线更新一个深度学习网络,而是用一个大网络进行预训练,然后让大网络知道什么是物体什么不是物体。
将大网络放在跟踪视频上面,然后再分析网络在视频上产生的不同特征,用比较成熟的浅层跟踪算法来进行跟踪,这样利用了深度学习特征学习比较好的好处,同时又利用了浅层方法速度较快的优点。效果是每秒钟10帧,同时精度破了记录。
最新的跟踪成果是基于Hierarchical Convolutional Feature,由一个韩国的科研组提出的MDnet。它集合了前面两种深度算法的集大成,首先离线的时候有学习,学习的不是一般的物体检测,也不是ImageNet,学习的是跟踪视频,然后在学习视频结束后,在真正在使用网络的时候更新网络的一部分。这样既在离线的时候得到了大量的训练,在线的时候又能够很灵活改变自己的网络。
基于嵌入式系统的深度学习
回到ADAS问题(慧眼科技的主业),它完全可以用深度学习算法,但对硬件平台有比较高的要求。在汽车上不太可能把一台电脑放上去,因为功率是个问题,很难被市场所接受。
现在的深度学习计算主要是在云端进行,前端拍摄照片,传给后端的云平台处理。但对于ADAS而言,无法接受长时间的数据传输的,或许发生事故后,云端的数据还没传回来。
那是否可以考虑NVIDIA推出的嵌入式平台?NVIDIA推出的嵌入式平台,其运算能力远远强过了所有主流的嵌入式平台,运算能力接近主流的顶级CPU,如台式机的i7。那么慧眼科技在做工作就是要使得深度学习算法,在嵌入式平台有限的资源情况下能够达到实时效果,而且精度几乎没有减少。
具体做法是,首先对网络进行缩减,可能是对网络的结构缩减,由于识别场景不同,也要进行相应的功能性缩减;另外要用最快的深度检测算法,结合最快的深度跟踪算法,同时自己研发出一些场景分析算法。三者结合在一起,目的是减少运算量,减少检测空间的大小。在这种情况下,在有限资源上实现了使用深度学习算法,但精度减少的非常少。
-
深度学习在计算机视觉领域的应用2024-07-01 2833
-
用于计算机视觉的经典机器学习应用分析2023-11-07 1057
-
计算机视觉中的九种深度学习技术2023-08-21 1333
-
浅谈深度学习在计算机视觉领域的三大瓶颈2023-06-11 913
-
理解如何处理计算机视觉和深度学习中的图像数据2023-04-26 1449
-
深度学习和传统计算机视觉技术在新兴领域的比较2022-11-28 2798
-
深度学习与传统计算机视觉简介2021-12-23 2251
-
超全!深度学习在计算机视觉领域应用一览(附链接)精选资料分享2021-07-28 1758
-
请问计算机视觉与深度学习要看什么书?2020-05-21 2722
-
技术 | 深度学习在计算机视觉领域的瓶颈已至2019-07-05 3374
-
计算机视觉的兴起与发展趋势2019-01-24 14797
-
深度学习不能取代计算机视觉技术背后的真正原因2018-04-05 5532
-
深度学习是否会取代传统的计算机视觉?2018-04-02 6912
-
介绍深度学习在计算机视觉领域四大基本任务中的应用2018-01-24 11796
全部0条评论

快来发表一下你的评论吧 !
