

基于DSP技术实现FMCW防撞雷达的设计应用方案
处理器/DSP
描述
来源:微计算机信息,作者:鲍吉龙;应延治;赵洪霞;沙济彰
一.引言
随着汽车工业和高速高架公路的飞速发展,汽车撞车事故也随之日益严重,汽车防撞报警是迫切需要解决的问题。欧洲的一项研究表明:驾驶员只要在有碰撞危险的0.5秒前得到预警,就可以避免至少60%的追尾撞车事故,30%的迎面撞车事故和50%的路面相关事故;若有1秒钟的“预警”时间,则可避免90%的事故。若在夜、雨、雪、雾等的恶劣天气的条件下,能见度低,司机视距小,汽车中、高速行驶时,很难及时发现前方障碍物并采取必要的措施。从经济方面来说,我国的桥梁、高速公路的运行受天气条件影响较大,为保证车辆运行的安全,遇到恶劣天气时以限制车速或关闭来达到安全的目的,这样毫无疑问将影响道路的通过能力,除造成巨大的经济损失外,使本来就拥挤的道路更加阻塞。近几十年来,美、日、西欧等国家的多家汽车公司投入巨资,先后研究成功了24GHZ,60GHZ,76.5GHZ的单脉冲和调制连续波两种体制的雷达系统。这两种体制的雷达系统已经在国外的一些汽车公司的高档轿车中应用,但由于其成本高昂而未得到广泛的应用。近年来,价格低廉的高性能DSP芯片的出现极大的推动了汽车防撞雷达技术研究,使汽车防撞雷达系统在普通汽车中的实现和普及成为可能。
由于受经济技术发展水平等因素的影响,我国在汽车防撞技术上的研究起步较晚,因此,相对于国外的防撞研究水平,我国的车用防撞系统的研制水平仍然较低。但这方面的研究已得到业界的高度重视。本文简要介绍和比较汽车防撞的几种探测方式,重点介绍雷达的工作原理。在此基础上,提出了一种基于DSP的FMCW防撞雷达设计方案,实现FMCW雷达低成本,高精度的测距测速功能,具体介绍了DSP在系统中的作用。
二.汽车防撞的几种探测方式
目前汽车防撞系统按目标探测方式主要有激光、超声波、红外等一些测量方法,不同的目标探测方式其工作过程和原理有不同之处,但它们的主要目的都是通过前方返回的探测信息判断前方车辆和本车间的相对距离,并根据两车间的危险性程度做出相应的预防措施。下面对不同的探测方法进行介绍和比较。
1.激光方式
激光具有高单色性,高方向性和相干性好等特点,因此激光波束近似直线性,很少扩散,波速能量集中,传输距离远。汽车防撞采用激光探测技术时,其工作原理为:首先利用本车装备的激光雷达发射激光束照射到前车的反光镜,然后检测反射回来的激光速的到达时间,根据激光束从发射到返回的时间差来判断两车的距离。
激光测距的测量精度很高,技术上已经有了很大的进步。但是,在汽车防撞领域,激光测距的应用具有局限性,主要是因为激光测距方式受天气状态、汽车的震动及反射镜表面磨损、污染等因素影响较大,测距精度难以保证。所以在汽车防撞领域激光测距方式没有得到发展。
2.超声波方式
超声波作为一种特殊的声波,同样具有声波传输的基本物理特性——反射、折射、干涉等等,超声波测距就是利用其反射特性,工作原理和声纳回声定位的原理基本相同。超声波发射器不断发射出某一频率的超声波,遇到被测物体后反射,当超声波接收器接受到反射信号,将其转变为电信号,测出发射波和反射波的时间差,根据声速即可求得距离。但是超声波测距的最大问题就是探测距离短,而且天气状态对它影响很大,所以超声波测距主要运用于倒车雷达等近距离测距。
3.红外线方式
红外线测距和激光、超声波测距在原理上基本相同,均是根据发射波和反射时间来判断目标的距离,红外线测距在技术上难度不大,构成的测距系统成本低廉,但是在恶劣的天气和长距离探测方面仍然不能满足汽车防撞的要求。
4.毫米波方式
毫米波是指波长介于1~10mm之间的电磁波,毫米波雷达测距在原理上和以上几种测距方式类似,但它克服了其他几种探测方式在汽车防撞运用中的缺点。
毫米波雷达的主要特征有:
1) 稳定的探测性能。不受被测物体表面形状、颜色等的影响;对大气紊流、气涡等具
有适应性。
2) 良好的环境适应性。毫米波雷达的穿透能力很强,其测距精度受雨、雪、雾及阳光
等天气因素和杂音、污染等环境的影响较小,可以保证车辆在任何天气下的正常运行。
从以上比较可以明显看出毫米波雷达比其他方式有更大的优越性,能够适应汽车防撞系统的要求。同时,更令人感兴趣的是,毫米波雷达不仅可以测量目标距离,而且还可以测量目标物体的相对速度及方位角等参数,使汽车在恶劣气候条件下实现盲行成为可能。此外,在相同的测量条件下毫米波雷达结构简单、分辨率高、天线部件尺寸小。
三.雷达目标探测的工作原理
根据测距原理的不同,毫米波雷达测距有脉冲雷达和调频连续波(FMCW)雷达两种。
1. 脉冲雷达
脉冲测距的原理(如图1所示)是通过判断发射脉冲信号与目标反射脉冲信号之间的时间差τ,结合毫米波的传播速度,计算两车的间距R[3]。

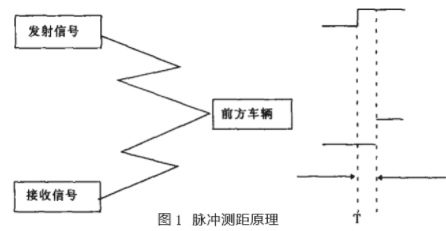
脉冲测距方式原理虽然简单,主要是判断发射信号和反射信号之间的时间差,但是在具体的技术实现上存在一定的难度。主要问题在于:对于脉冲雷达系统,当目标距离很近时,发射脉冲和接收脉冲之间的时间差非常小,这就要求系统采用高速信号处理技术,从而使近距离测距变得十分复杂,成本也大幅上升。因此该方式实用性不强。
2. 调频连续波(FMCW)雷达
与脉冲雷达相比,FMCW具有所需发送功率低,信号处理复杂程度低及成本低廉的显著优点。目前在汽车防撞研究中得到广泛的应用和研究。因此,本文将重点介绍调频连续波(FMCW)雷达。
1)测距原理
雷达系统通过天线向外发射一列连续调频毫米波,并接收目标的反射信号。发射波的频率随时间按调制电压的规律变化。反射波与发射波的形状相同,只是在时间上有一个延迟τ,τ与目标距离R的关系同样可用式(1)表示。
2)测速原理
如果反射信号来自一个相对运动的目标,则反射信号中包括一个由目标的相对运动所引起的多普勒频移fd。
根据多普勒原理,目标的相对运动速度可用式(2)表示:

四.基于DSP的汽车防撞探测技术
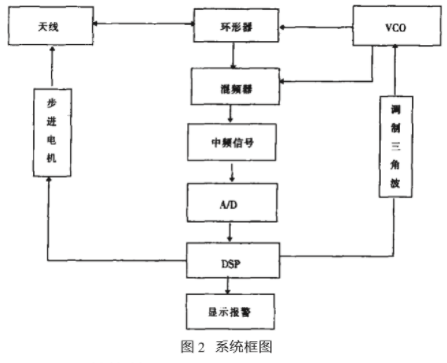
车载微波探测雷达设计的目的就是及早探测到路况复杂、能见度差的地段上有潜在的危险目标,将测得的信息转换为指令,为驾驶员提供减速、制动、转向、停车等警示信息。由于车辆行驶过程中雷达接收的信号十分复杂,包含多种杂波成分,需要进行大量复杂的数字信号处理运算,对雷达视域内的多个目标进行检测、分类、识别、跟踪,同时报警,所以考虑采用高性价比的DSP芯片来完成。该系统可分为两个部分组成:FMCW前端和DSP单元。FMCW前端将安装在车辆的外面,DSP单元则安装在驾驶员旁边,两者用隐蔽的电线相连,不影响车辆的性能和外观,方便实用。
整个系统框图如图2所示:
1.信号发射/接收单元
压控振荡器(VCO)在DSP编码产生的三角波电压控制下,产生调频连续波信号经天线向外辐射。由于本系统利用雷达回波信号来测量距离和速度,对发射信号的频率稳定性和线性度要求很高,因此采用集成微波组件作为发射/接收单元。回波信号与发射波信号进行混频,得到中频差拍信号并输出。
2.回波信号放大、滤波单元
由于发射/接收单元的发射功率较小,当信号在空中传播时,能量减弱的很快,到达目标并反射的雷达回波信号功率非常小,需要进行足够的放大才能进行后续处理。因此回波信号先经过高增益对数放大器进行放大,再经过隔离、滤波、放大后送至A/D转换器。
3.A/D转换单元
DSP系统只能对数字信号进行处理。因此,要对模拟信号进行A/D转换,即在规定的时间内把模拟信号在时刻t的幅度值转为一个相应的数据,再把数据送到DSP进行处理。
4.DSP模块
1)DSP产生调制信号使VCO工作,产生调频连续波信号向外辐射。调制信号是一系列三角波。如图3所示:
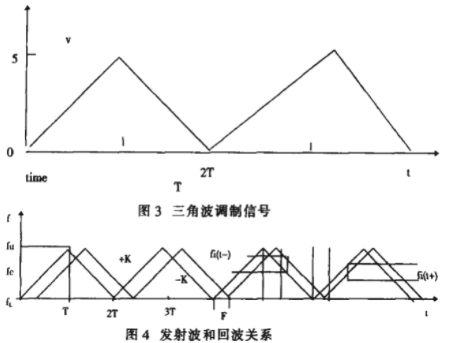
上图表示的是理想的三角波,最大幅度是5V,周期为1000μS。但是实际直线性并不理想,可以采用一些平滑的方法来改善调制信号的直线性。
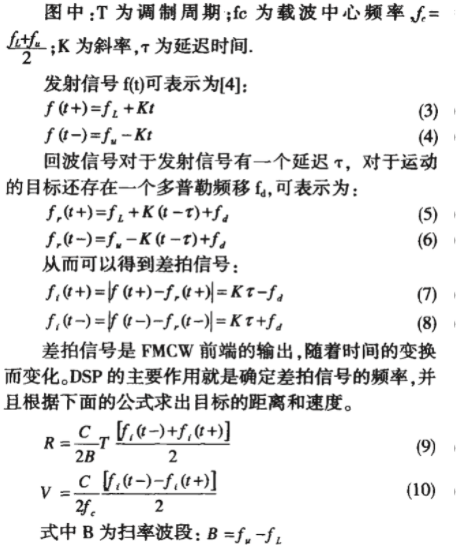
2)VCO经调制向外发射的是一系列三角波,回波信号也是三角波,两者关系如图4所示:
3)确定信号的频率及对信号进行频谱分析。信号的频谱分析主要有FFT法和非FFT法,所谓FFT法,就是对被分析的信号进行傅立叶变换,将其从时域变换到频域,在频域进行分析,必要时再通过傅立叶逆变换,变回时域的分析方法。而非FFT变换方法则是通过其他的途径,获得信号的频率参数,如最大熵法,各有特点。综合考虑方法的实时性,复杂性,稳定性,对于汽车雷达而言,应首选FFT法,而且对于DSP来说,FFT法比较成熟,更容易实现。
4)DSP通过控制步进电机来控制天线的扫描,从而可以得到障碍物相对于雷达的方位信息。天线的扫描不是360度,而是根据给定的角度,不停的从左到右,再从右到左不断循环。
DSP通过一个方波信号来控制扫描方向,方波信号是高电平的时候从左向右扫描,低电平的时候从右向左扫描。而DSP通过另一个有延迟的方波信号来确定天线扫描的位置,高电平表示在右边区域,低电平表示在左边区域。
5.显示报警模块
将数据处理结果显示在LED上,给驾驶员提供信息,当障碍物距离超过危险距离时,通过发光二极管报警,使驾驶员能够及时采取措施,防止事故的发生。
五.结束语
随着智能交通系统研究的不断发展,汽车巡航控制和防撞控制领域会需要越来越多的雷达传感器,FMCW体制的毫米波雷达则是最具潜力的一种,特别是随着DSP的发展,将DSP应用在FMCW雷达中,将促进它的发展。
责任编辑:gt
-
单脉冲FMCW雷达DSP功能2011-02-27 1687
-
FMCW测距雷达2014-03-20 5157
-
24GHz微波雷达FMCW测距系统设计概述2015-12-29 19410
-
汽车安全解决方案/雷达传感器2016-10-09 2890
-
Ameya360 汽车雷达系统解决方案2018-04-19 4765
-
汽车防撞雷达的专家做进一步解读特斯拉电动车的自动驾驶系统2018-09-03 4445
-
基于DSP的多功能汽车防撞雷达的设计2009-05-16 591
-
ADI发布新款PLL合成器,用于实现高性价比FMCW雷达系统2010-01-13 1483
-
FMCW雷达系统及其前端数据采集模块设计2012-05-29 1874
-
汽车防撞系统技术方案:毫米波防撞雷达2018-04-18 14257
-
基于dsp防撞雷达信号采样系统设计2018-12-19 1668
-
全球光学巨头提供FMCW激光雷达解决方案2019-01-08 6516
-
如何使用DSP实现汽车防撞雷达系统的设计2020-11-26 1165
-
FMCW激光雷达为自动驾驶“指明”方向2021-08-26 6511
-
相位噪声对FMCW雷达系统的影响2024-01-31 3660
全部0条评论

快来发表一下你的评论吧 !
