

精密旋变数字转换器在工业级和汽车领域的应用研究
模拟技术
描述
作者: Jakub Szymczak、 Shane O‘Meara、 Johnny S. Gealon和 Christopher Nelson De La Rama
简介
旋变器和机电传感器可用来精确测量角位置,以可变耦合变压器的方式工作,其初级绕组和两个次级绕组之间的磁耦合量根据旋转部件(转子)位置而改变;转子通常安装在电机轴上。旋变器可部署在工业电机控制、伺服器、机器人、混合动力和全电动汽车中的动力系统单元以及要求提供精确轴旋转的其他许多应用中。旋变器在这些应用中可以长期耐受严苛条件,是恶劣环境下军用系统的完美选择。
标准旋变器的初级绕组位于转子上,两个次级绕组位于定子上。而另一方面,可变磁阻旋变器的转子上无绕组,其初级和次级绕组均在定子上,但转子的凸极(裸露极点)将次级正弦变化耦合至角位置。图 1 显示经典和可变磁阻旋变器。

图 1. 经典旋变器与可变磁阻旋变器
如等式 1 所示,当正弦信号激励初级绕组 R1 – R2时,在次级绕组上会产生一个感应信号。耦合至次级绕组的信号大小与相对于定子的转子位置成函数关系,其衰减系数称为旋变器转换比。由于次级绕组机械错位 90°,两路正弦输出信号彼此间的相位相差 90°。旋变器输入和输出电压之间的关系如等式 2 和等式 3 所示。等式 2 为正弦信号,等式 3 为余弦信号。
 (1)
(1)
 (2)
(2)
 (3)
(3)
其中, θ 是轴角, ω 是激励信号频率, E0 是激励信号幅度, T 是旋变器转换比。
两路输出信号由轴角的正弦和余弦信号调制。激励信号以及正弦和余弦输出信号的图示如图 2 所示。正弦信号在 90°和 270°时具有最大幅度,余弦信号在 0°和 180°时具有最大幅度。
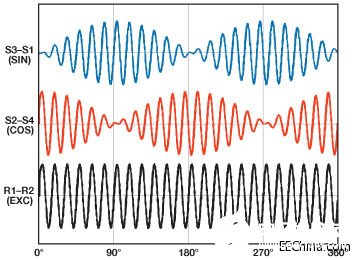
图 2. 旋变器电气信号示意图
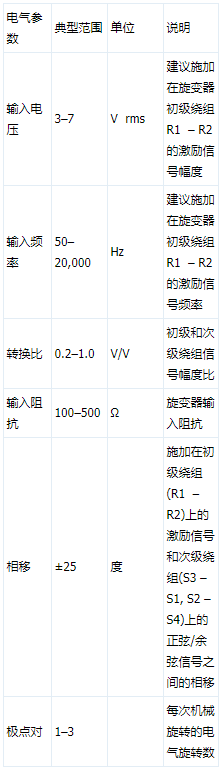
旋变器传感器有一组独特的参数,在设计时应予以考虑。最重要的电气参数以及相关的典型规格汇总在表 1 中。
表 1. 旋变器关键参数
旋变数字转换器
采用正弦波参考信号激励初级绕组会在次级绕组上产生两路电磁感应差分输出信号(正弦信号和余弦信号)。旋变数字转换器(RDC)在旋变器和系统微处理器之间实现接口,采用这些正弦和余弦信号解码电机轴的角位置和旋转速度。
大部分RDC使用Type-II跟踪环路计算位置和速度。Type-II环路采用二阶滤波器,确保静止或恒定速度输入信号的稳态误差为零。RDC对两路输入信号进行同步采样,为跟踪环路 提供数字化数据。使用这类环路的RDC最新实例,是ADI的完整 10 位至 16 位跟踪转换器AD2S1210 ,其片内可编程正 弦振荡器提供初级绕组的激励信号。
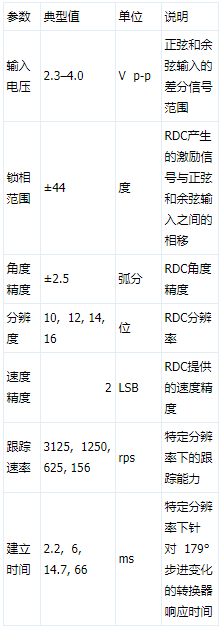
如表 1 所示,典型旋变器需要一个低阻抗的 3 V rms至 7 V rms信号,才能驱动初级绕组。RDC采用 5 V电源供电,提供典型值为 7.2 V p-p差分信号的激励输出。该信号的幅度和驱动能力无法满足旋变器的输入规格。此外,旋变器最高可将信号衰减 5 倍,因此旋变器输出幅度不符合RDC输入幅度要 求,如表 2 所示。
对此问题的一种解决方案是使用差分放大器增压初级端的正弦信号。该放大器必须要能够驱动低至 100 Ω的负载。常 见的做法是以大信号驱动初级端,以获得良好的信噪比。随后,便能以电阻分压器衰减输出正弦和余弦信号。
在很多工业和汽车应用中,噪声环境下使用RDC会使正弦和余弦线路上感应高频噪声。为了解决这一问题,应尽可能靠近RDC放置一个简单的差分低通滤波器。图 3 显示集成放大 器和滤波器的典型旋变数字转换器接口。

图 3. 典型旋变系统框图
工作原理
图 4 显示RDC的工作框图。转换器通过产生一个输出角ϕ连续跟踪轴角θ,然后将其反馈并与输入角进行比较。当转换器跟踪位置时,两个角度之间的误差最小。

图 4. AD2S1210 工作原理图
为了测量误差,将正弦和余弦输入分别乘以(ϕ)和sin(ϕ) :
 (4)
(4)
 (5)
(5)
然后,求两者之差:
 (6)
(6)
最后,使用内部产生的合成基准解调信号:
 (7)
(7)
对于较小的角度误差(θ – ϕ),运用三角恒等式E0 (sin θ cos ϕ – cos θ sin ϕ) = E0 sin (θ – ϕ),即大致等于 E0 (θ – ϕ) 。 E0 (θ – ϕ)是转 子角度误差和转换器数字角度输出之差。Type-II跟踪环路消除了误差信号。完成该操作后,ϕ等于旋转角θ 。
RDC 重要参数
选择合适的器件之前,工程师必须考虑表征旋变数字转换器的一系列参数。表 2 显示AD2S1210 的RDC重要参数和规格,这些参数和规格奠定了同类一流转换器的基础。
表 2. AD2S1210 的RDC重要参数和数值
误差源
完整系统的精度由RDC精度,以及旋变器、系统架构、线缆、激励缓冲器和正弦/余弦输入电路的误差所确定。最常见的系统误差来源是幅度失配、信号相移、失调和加速。
幅度失配是正弦和余弦信 号达到峰值幅度(余弦为 0°和180°,正弦为 90°和 270°)时,它们的峰峰值幅度之差。失配可以是旋变器绕组的变化产生的,也可以是旋变器和RDC 正弦/余弦输入之间的增益产生的。等式 3 可以重新改写为:
 (8)
(8)
其中,δ是余弦信号相对于正弦信号的幅度失配百分比。静态位置误差ε以弧度表示,定义如下:
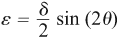 (9)
(9)
等式 9 显示幅度失配误差以转速的两倍振荡,δ/2 最大值等于 45°的奇数倍,并且在 0°、90°、180°和 270°时无误差。对于 12 位RDC而言,0.3%幅度失配将产生大约 1 LSB的误差。
RDC可接受来自旋变器的差分正弦和余弦信号。旋变器移除载波上的所有直流分量,因此必须添加一个VREF/2 直流偏置,以确保对于RDC而言,旋变器输出信号在正常工作范围内。SIN和SINLO输入或COS和COSLO输入之间的任何直流偏置失调都会引起额外的系统误差。
在正弦和余弦信号载波相互反相的象限内,共模失调引起的误差更严重。当位置范围为 90°至 180°,以及 270°至 360°时,就会出现这种情况,如图 5 所示。两端点之间的共模电压会使差分信号产生两倍于共模电压的失调。RDC是比率式 的,因此输入信号幅度感知变化会导致位置产生误差。
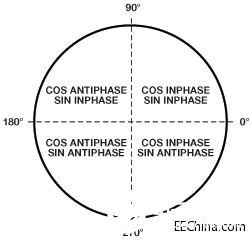
图 5. 旋变器象限
图 6 显示哪怕正弦和余弦信号的差分峰峰值幅度相等,输入信号的感知幅度也有所不同。在 135°和 315°时,误差最大。在 135°时,理想系统中A = B,但存在失调时 A ≠ B ,因此产生了感知幅度失配。
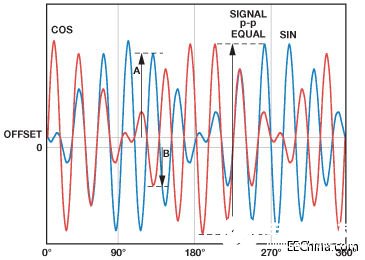
图 6. 直流偏置失调
误差的另一个来源是差分相移,即旋变器正弦和余弦信号之间的相移。受耦合影响,所有旋变器上都会出现一些差分相移。只要存在微小的旋变残余电压或正交电压,即表示出现较小的差分相移。如果正弦和余弦信号线路的电缆长度不等,或者驱动不同的负载,也会产生相移。
余弦信号相对正弦信号的差分相位可以表示为:
 (10)
(10)
其中,α 是差分相移。
求解αα 引起的误差,便可得到误差项ε:
 (11)
(11)
其中,α 和 ε 的单位为弧度。
大部分旋变器还会在激励参考信号和正弦/余弦信号之间产生相移,导致额外的误差 ε :
 (12)
(12)
其中,β 是正弦/余弦信号和激励参考信号之间的相移。
通过选择具有较小残余电压的旋变器、确保正弦和余弦信号采取完全相同的处理方式并消除参考相移,则可将此误差降 至最小。
在静态工作条件下,激励基准信号和信号线之间的相移不会影响转换器精度,但由于转子阻抗和目标信号的无功分量,运动中的旋变器会产生速度电压。速度电压位于目标信号象限内,它仅在运动时产生,在静态角度下并不存在。其最大幅度为:

(13)
在实际旋变器中,转子绕组同时含有无功和阻性分量。当转子存在速度但又处于静止状态时,阻性分量会在参考激励中 产生非零相移。激励的非零相移与速度电压共同导致跟踪误差,可近似计算如下:
 (14)
(14)
为了补偿旋变器参考激励和正弦/余弦信号之间的相位误差,AD2S1210 采用内部滤波后的正弦和余弦信号来合成与参考 频率载波相位一致的内部参考信号。它通过确定正弦或余弦(取较大者,以改善相位精度)的过零并评估旋变器参考激励相位,便可降低参考信号和正弦/余弦输入信号之间的相移至 10°以内,并在±44°相移情况下工作。合成参考模块的框图如图 7 所示。
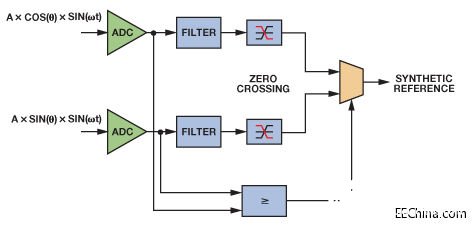
图 7. 合成参考
相比Type-I环路,Type-II跟踪环路的优势是恒定速度下不会产生位置误差。然而,哪怕在完美平衡的系统中,加速度也会产生误差项。加速度产生的误差量由控制环路响应确定。图 8 显示AD2S1210 的环路响应。
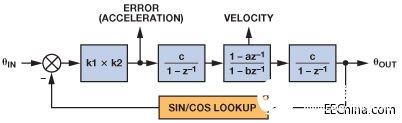
图 8. AD2S1210 环路响应
环路加速度常数Ka可以表示为:
(15)
其中,环路系数随分辨率、输入信号幅度和采样周期的变化而改变。AD2S1210 在每个CLKIN 周期中进行两次采样。
表 3. RDC系统响应参数

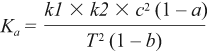
加速度产生的跟踪误差便可计算如下:

(16)
图 9 显示不同分辨率设置下的角度误差与加速度的关系。
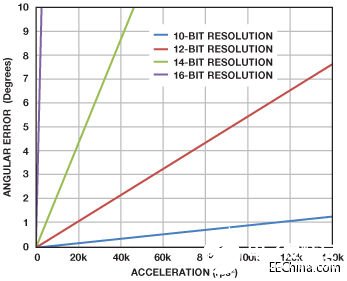
图 9. 角度误差与加速度的关系
输入滤波器
为获得最佳的系统精度,可将旋变器输出直接连接至AD2S1210 SIN、COS、SINLO和COSLO引脚,减少失配或相移。但是,该方法并非始终有效。可能需要衰减旋变器的正弦和余弦信号,以匹配RDC的输入规格;由于环境噪声干扰严重,可能需要对信号进行过滤,并且旋变器的连接器还可能需要提供ESD或短路保护。
图 10 显示旋变器和AD2S1210 之间的典型接口电路。串联电阻和二极管提供适当的保护,降低外部事件(如ESD或电源/接地短路)的能量。这些电阻和电容部署了低通滤波器,可以减少由于驱动电机而耦合至旋变器输入端的高频噪声。可能还需要衰减旋变器的正弦和余弦输入信号,以便符合RDC的输 入电压规格 。这可以 通过添加 一个电阻 RA来实现。 AD2S1210 集成内部偏置电路,可将SIN、SINLO、COS和COSLO偏置为VREF/2。该微弱的偏置可轻松过载,一种简单的实现方法是采用 47 kΩ电阻RB,它可将信号偏置为 2.5 V。
图 10. 接口电路
激励缓冲器
通常需要使用缓冲器来驱动旋变器的低阻抗输入。有很多种方法可以部署该激励缓冲器,本文介绍其中的两种方法。第一种电路常用于汽车和工业设计中,第二种电路以高输出电流放大器代替标准推挽式架构,简化了设计。
11 所示之高电流驱动器可放大参考振荡器的输出,并对其进行电平转换操作。驱动器使用双通道、低噪声、精密运算放大器AD8662,以及一个分立式发射极跟随器输出级。缓冲器翻版电路提供全差分信号,驱动旋变器的初级绕组。
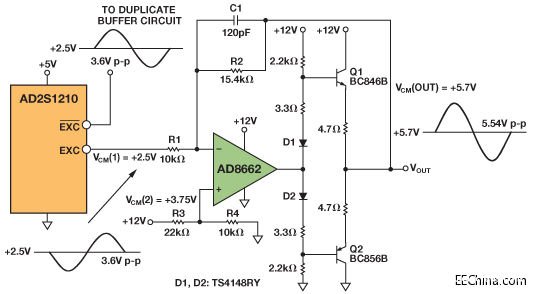
图 11. 使用运算放大器 AD8662 的高电流参考缓冲器(具有推挽式输出)
该高电流缓冲器提供针对标准旋变器优化的驱动能力、增益范围和带宽,可进行调节以便满足特定应用和传感器的要求,但其复杂的设计带来了一系列缺点,比如元件数、PCB尺寸、成本和进行修改以满足特定应用所需的工程设计时间。
通过采用放大器代替AD8662,可以优化该设计;放大器提供直接驱动旋变器所需的高输出电流,简化了设计,无需使用推挽级。
图 12 中的高电流驱动器采用高电流双通道运算放大器AD8397 该器件具有轨到轨输出,可以放大参考振荡器输出信号并对其进行电平转换,优化旋变器接口。AD8397 具有低失真、高输出电流和宽动态范围特性,非常适合与旋变器一同使用。在 32 Ω负载情况下,该器件具有 310 mA电流能力,无需使用传统的推挽级便可为旋变器提供所需的电源,从而简化驱动器电路,并降低功耗。翻版电路提供全差分信号,驱动初级绕组。AD8397采用 8 引脚SOIC封装,额定工作温度 为–40°C至+125°C扩展工业温度范围。
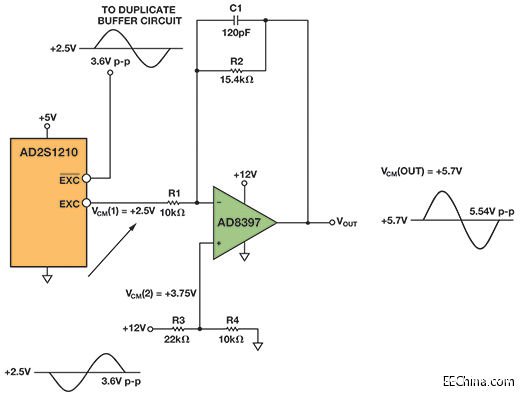
图 12. 基于运算放大器 AD8397 的高电流参考缓冲器
可以修改无源元件值,以改变输出幅度和共模电压;输出幅度由放大器增益 R2/R1设置,而共模电压由R3 和 R4设置。
电容 C1 和电阻R2组成低通滤波器,最大程度降低EXC和EXC输出端的噪声。应当以最大程度降低载波的相移为标准选择电容。激励输出和正弦/余弦输入之间的总相移不应超过RDC的锁相范围。电容为可选元件,因为经典旋变器可以很好地过滤高频分量。
图 13 显示AD8397 参考缓冲器与传统推挽电路的对比。FFT分析仪测量AD2S1210 激励信号的基波和谐波功率。
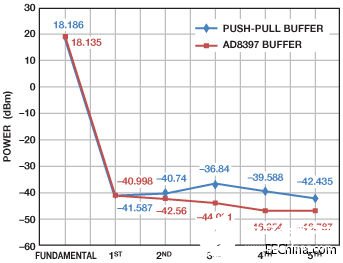
图 13. 缓冲器 AD8397与推挽缓冲器 AD8662
在两种配置中,基波功率几乎没有差异,但缓冲器AD8397的谐波更低。虽然AD8397 电路的失真略低,但两个缓冲器的性能相当。相比传统电路,省略推挽级可以简化设计、减 少空间并降低功耗。
结论
与旋变数字转换器AD2S1210 一同使用时,旋变器可以为电机控制应用的位置和速度测量提供高精度、性能稳定的控制 系统。为了获得最佳的整体性能,需要使用基于AD8662 或 AD8397的缓冲器电路以放大激励信号,同时提供旋变器所需的驱动强度。为了使系统更为完整,可以按需采用基本输 入电路提供信号调理。如同所有混合信号机电一体化信号 链,设计精确系统时必须十分仔细地考虑到所有误差来源。 AD2S1210 具有可变的分辨率,可以生成参考信号,并集成 片内诊断功能,是旋变器应用的理想RDC解决方案。该器件同时提供工业级和汽车级产品。
责任编辑:gt
-
深入解析AD2S1210:高性能旋变数字转换器的卓越之选2026-03-29 740
-
高性能、10位至16位旋变数字转换器电路笔记2023-11-29 717
-
分辨率旋变数字转换器AD2S1210应用指南2023-11-28 1138
-
精密旋变数字转换器的测量角位置和速度2023-11-23 540
-
RDC旋变数字转换器电机应用2022-02-23 7135
-
CN0276 高性能、10位至16位旋变数字转换器2021-06-05 2013
-
精密旋变数字转换器测量角位置和速度,不看肯定后悔2021-04-13 2425
-
MT-030: 旋变数字转换器2021-03-21 1280
-
AD2S80A:分辨率可变的单芯片旋变数字转换器2021-03-19 993
-
高性能旋变数字转换器AD2S1210的特点及应用分析2021-03-15 28510
-
精密旋变数字转换器测量角位置和速度2016-01-07 1097
-
旋变数字转换器(RDC)在汽车和工业中的应用2012-11-02 14594
全部0条评论

快来发表一下你的评论吧 !
