

基于无人机技术实现变电站周界安防巡逻系统的设计
军用/航空电子
描述
来源:东北电力技术,作者:田小壮,石辉,曾庆松,张志辉,关靖涛
变电站安防监视系统主要依靠固定的视频监控摄像头作为监控主体,监控及安防问题以变电站监控人员判断为准,这会产生一定问题。
a. 加大监控人员的工作量,增加监控人员数量,违背了变电站无人值守化目标;
b. 由于监控人员的疏忽,未能及时发现安全或其他安防问题,影响变电站的正常运行;
c. 视频监控存在死角,监控人员没有发现安全隐患,导致问题恶化,威胁整个变电站的安全。这些问题是固定视频监控摄像头本身存在的问题,为此提出了变电站周界无人机的安防巡逻系统。利用无人机在变电站巡逻已在部分变电站使用,并逐渐扩大应用。国网新疆电力有限公司检修公司目前对于变电站周界及内部的监控安防主要是视频设备监控,经过多年操作与实践,积极学习现代高科技、新技术后,为实现无人值守变电站,对于变电站安防系统,要安排最少的监控人员甚至不 需要监控人员,全部由智能安防巡逻系统来进行。在满足无人值守的前提下,尽可能节约成本,又起 到全面监控、安防的作用,为此研究出变电站周界 无人机安防巡逻系统。
1 系统现状和技术发展
随着通用航空技术的普及和发展,特别是无人机技术的提高,无人机支持的巡检载波和地面监测设备的传输线检测系统具有覆盖面广、效率高、可靠性高、风险低、成本低等优点。近年来,多旋翼无人机由于机动性强、控制简单、维护和运输方便,逐步取代传统的单旋翼无人机。基于航拍影像的图像处理与识别技术的快速发展,为变电站安防的快速智能诊断提供了理论支持。
变电站巡检系统组成主要包含多旋翼无人飞行器系统 ( Unmanned Multi-Rotor System,UMRS) 和地面站系统 ( Ground Station System,GSS) ,如图 1 所示。UMRS 用于获取传输线路周界的全方位图像数据,通过无线影像传输系统将获取的图像数据实时传输到 GSS 的空中工作部件。GSS 对当前获取的传输线路具有实时观察和存储的功能。GSS 图像功能和地面诊断系统可以实时诊断采集的图像,找出存在的缺陷,为监控人员提供真实、全面的现场数据和缺陷信息,实现相应的设备维护检修。
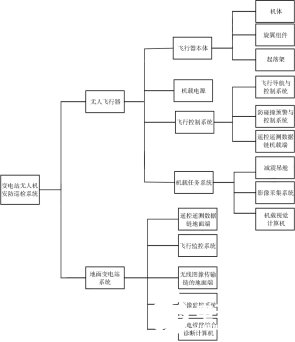
图 1 变电站巡检系统组成
1. 1 多旋翼无人飞行器系统
多旋翼无人飞行器系统是以 UMRS 为主体, 搭载机载电源、飞行控制系统和机载任务设备。UMRS 由机体、起落架和多个旋翼构成。
a. 机载电源使用锂/ 锂聚合物动力电池。根据 UMRS 的性能规格优化电池的容量和质量,使UMRS 满足变电站检测的飞行要求。
b. 飞行控制系统是 UMRS 的核心部分,可确保稳定飞行、快速转弯、高精度悬停等。飞行控制系统包括导航组件 ( 惯性导航单元IMU+GPS) ,飞行控制计算机,旋翼驱动组件,远程遥测系统机载端和线路防撞预警系统。其中导航组件用于差分定位 UMRS,并感测 UMRS 的角速率以解决姿态角信息。
c. 通过电线防撞警告系统实时判断 UMRS 与附近电线之间的位置关系。UMRS 与输电线路的距离小于电网规定的安全距离时,预警系统自动报警 并产生驱逐驱动命令,使 UMRS 远离危险区域, 避免撞线对输电线路的再次破坏,使 UMRS 和输电线路更加安全。
a. 机载任务设备系统包括 1 个减震云台、1 个图像采集系统和 1 个无线图像数据传输系统的机载端。图像采集系统安装在减震平台上,由控制平台滚转,对变电站进行全方位拍摄,得到的图像信息由无线图像传输系统机载端实时发送到 GSS 地面接收端。
b. 为了增强 UMRS 的自主性,机载任务系统可以加强传输设备识别和跟踪系统,实现 UMRS智能跟踪检测。
1. 2 地面站系统
GSS 由遥控遥测系统地面端、无线图像数据传输系统地面端、飞行监控系统、图像监控系统、图像巡检综合诊断系统等组成[。
a. 遥控遥测系统地面端对 UMRS 实时发送遥控遥测指令以对 UMRS 有更高指令控制。
b. 无线图像数据传输系统地面端主要接收机载端发送的实时图像数据。
c. 图像监控系统用于监控机载任务系统中图像采集装置的工作状态,保证图像成像系统正常运行。
d. 图像巡检综合诊断系统主要对航拍视频和图像的线路缺陷进行智能识别和诊断。
1. 3 系统工作流程
系统工作流程如图 2 所示。

图 2 系统工作流程
无人机在变电站周界飞行环绕,在指定的地点对变电站进行图像记录,通过无线数据传输到监控 计算机,根据计算机对每次同一位置、不同时刻的 图像进行对比,判断该位置是否发生安全事故或者 其他安防问题,从而自动识别安全隐患以及对变电 站进行全局监控,改善并解决原有监控安防系统的 缺陷。利用无人机进行变电站周界的安防巡逻工作, 结合红外围栏、电子围栏等传统技术,在无人机高清 摄像头的主导作用下,将拍摄图像进行灰度化、二值化等处理,清楚地判断变电站周界是否被入侵和接近,并通过自动报警系统来提示变电站监控人员。
2 系统原理
系统主要依靠无人机进行监控、报警。无人机通过编写的特定程序在变电站周界特定位置进行图像采集。
2. 1 无人机特定位置采集图像原理
对变电站的周界进行合理考察,用计算机语言进行编程,将具体的飞行航线编写进程序,与无人机的内部程序相连接,使无人机能够按照指定的轨道进行巡视,既不会影响变电站内部设施运行,又不会飞得过远浪费电能,还能在特定位置稳定停止,从而采集到稳定清晰的图像。无人机巡逻系统包括 3 个部分,如图 3 所示。

图 3 无人机巡逻系统组成
2. 2 无线数据传输原理
传统的有线数据传输系统,传输数据速度快、可靠性好、通信效果理想,但不适用无人机的周界 巡逻。随着射频技术发展,无线传输变得简单方便, 可以随时移动,避免了有线传输系统布线麻烦的问 题。无人机属于移动数据传输系统,无人机和地面 监测系统通过无线数据传输设备进行数据通信,数 据传输设备分为机载设备和地面设备,监控软件的 计算机通过 USB 和地面数据传输设备交换数据。数据链路工作流程如图 4 所示。

图4 数据链路工作流程
无人机与地面监控系统之间使用全双工通信传输模式,同时进行无人机遥测数据接收和监控系统控制指令发送。交换数据的准确性对实现无人机监测和电力巡检人员的决策非常重要,数据通信模块的可靠性对变电站无人机安防巡逻的安全执行具有重要作用。
无人机每次在同一位置进行图像采集后,比较 2 次图像之间的差别,通过计算机判断该图像区域是否有物体入侵,达到不需要监控人员观察就能实 现变电站周界的安全防范。无人机将记录的图像传回,由计算机进行图像对比和入侵判断,因此需要 编写图像的对比算法,判断同一位置的 2 张图像在灰度化、二值化后,其 “0”、 “1” 值的组合或数量是否满足规定要求,一旦计算机通过比较算法发 现不满足要求,则为入侵事件。数据处理系统的图 像采集模块主要对航拍图像进行滤波、去模糊复 原、边缘检测提取等图像处理过程,从图像中提取 必要的信息为故障判断和线路跟踪提供依据。目标跟踪就是找到相邻图像之间的联系,尤其是对 无人机镜头中的突变、渐变以及复杂背景引起的高 斯噪声和混合噪声进行前期处理。
无人机对某变电站设备进行巡检,实际效果如图 5 所示。
图 5 无人机巡检画面
2. 3 报警系统
当计算机判定出现入侵事件时,将会记录入侵图像,打包发给监控后台或控制中心,监控人员通过提示或警报直接接收入侵图像和信息,方便进行下一步的警告或其他行为,不需要一直进行监视。
3 结 束 语
无人机安防巡检系统提高了变电站周界巡逻的 效率以及视频监控的可靠性,降低了成本,减少了 监控人员的数量。系统改变程序后,可以进行变电 站全局监控巡逻,进一步减少监控人员数量,进一 步实现变电站无人值守化。该系统在重要的工厂、企业都可以应用,将对安防工作起到重大作用。
责任编辑:gt
-
ZY2000低空安防激光系统:全天候无人机反制解决方案2025-02-11 1744
-
地区变电站自动化系统设计2011-03-07 2928
-
无人值班变电站电气设备音频监控系统技术研究报告2012-08-20 3332
-
【OK210申请】智能变电站在线监测系统2015-07-20 2191
-
如何实现对变电站智能远程视频监控系统的设计?2021-06-03 1907
-
为什么变电站人员定位系统更倾向于UWB定位技术2021-11-09 1415
-
变电站的不同布局类型2023-04-18 1543
-
什么是室内变电站?2023-04-21 1627
-
变电站智能防误系统的设计及实现2011-09-21 664
-
无人机在安防领域有什么拓展的应用2019-10-31 3487
-
福建电力科学研究院完成变电站无人机高空区域全自主验收2020-11-28 1801
-
无人机在变电站巡视中的应用2021-06-26 2579
-
STS-H1-TS变电站无人机巡检飞行仿真系统特点及核心功能2023-06-19 1076
-
箱式变电站无人值守系统2023-09-08 1475
-
无人值守变电站的发展与变电站综合自动化系统2024-04-02 1651
全部0条评论

快来发表一下你的评论吧 !
