

一文解析深度学习的优算方法
描述
神经网络的学习的目的是找到使损失函数的值尽可能小的参数。这是寻找最优参数的问题,解决这个问题的过程称为最优化(optimization)。遗憾的是,神经网络的最优化问题非常难。这是因为参数空间非常复杂,无法轻易找到最优解(无法使用那种通过解数学式一下子就求得最小值的方法)。而且,在 深度神经网络中,参数的数量非常庞大,导致最优化问题更加复杂。
为了找到最优参数,我们将参数的梯度(导数)作为了线索。 使用参数的梯度,沿梯度方向更新参数,并重复这个步骤多次,从而逐渐靠近最优参数,这个过程称为随机梯度下降法(stochastic gradient descent),简称SGD。SGD是一个简单的方法,不过比起胡乱地搜索参数空间,也算是“聪明”的方法。
打个比方: 有一个性情古怪的探险家。他在广袤的干旱地带旅行,坚持寻找幽 深的山谷。他的目标是要到达最深的谷底(他称之为“至深之地”)。这 也是他旅行的目的。并且,他给自己制定了两个严格的“规定”:一个 是不看地图;另一个是把眼睛蒙上。因此,他并不知道最深的谷底在这个广袤的大地的何处,而且什么也看不见。在这么严苛的条件下,这位 探险家如何前往“至深之地”呢?他要如何迈步,才能迅速找到“至深 之地”呢?
寻找最优参数时,我们所处的状况和这位探险家一样,是一个漆黑的世界。我们必须在没有地图、不能睁眼的情况下,在广袤、复杂的地形中寻找 “至深之地”。大家可以想象这是一个多么难的问题。
在这么困难的状况下,地面的坡度显得尤为重要。探险家虽然看不到周 围的情况,但是能够知道当前所在位置的坡度(通过脚底感受地面的倾斜状况)。 于是,朝着当前所在位置的坡度最大的方向前进,就是SGD的策略。勇敢的探险家心里可能想着只要重复这一策略,总有一天可以到达“至深之地”。
SGD
用数学式将SGD可以写成如下形式:

为需要更新的权重参数,∂L∂W\frac{\partial L}{\partial W}∂W∂L为损失函数LLL关于WWW的梯度。η\etaη表示学习率,一般会取0.01或0.001这些事先决定好的值。式中的←\leftarrow←表示用右边的值更新左边的值。
缺点:
(1)SGD 因为更新比较频繁,会造成 cost function 有严重的震荡。
SGD呈 “之”字形移动。这是一个相当低效的路径。也就是说, SGD的缺点是, 如果函数的形状非均向(anisotropic),比如呈延伸状,搜索的路径就会非常低效。因此,我们需要比单纯朝梯度方向前进的SGD更聪 明的方法。 SGD低效的根本原因是, 梯度的方向并没有指向最小值的方向。
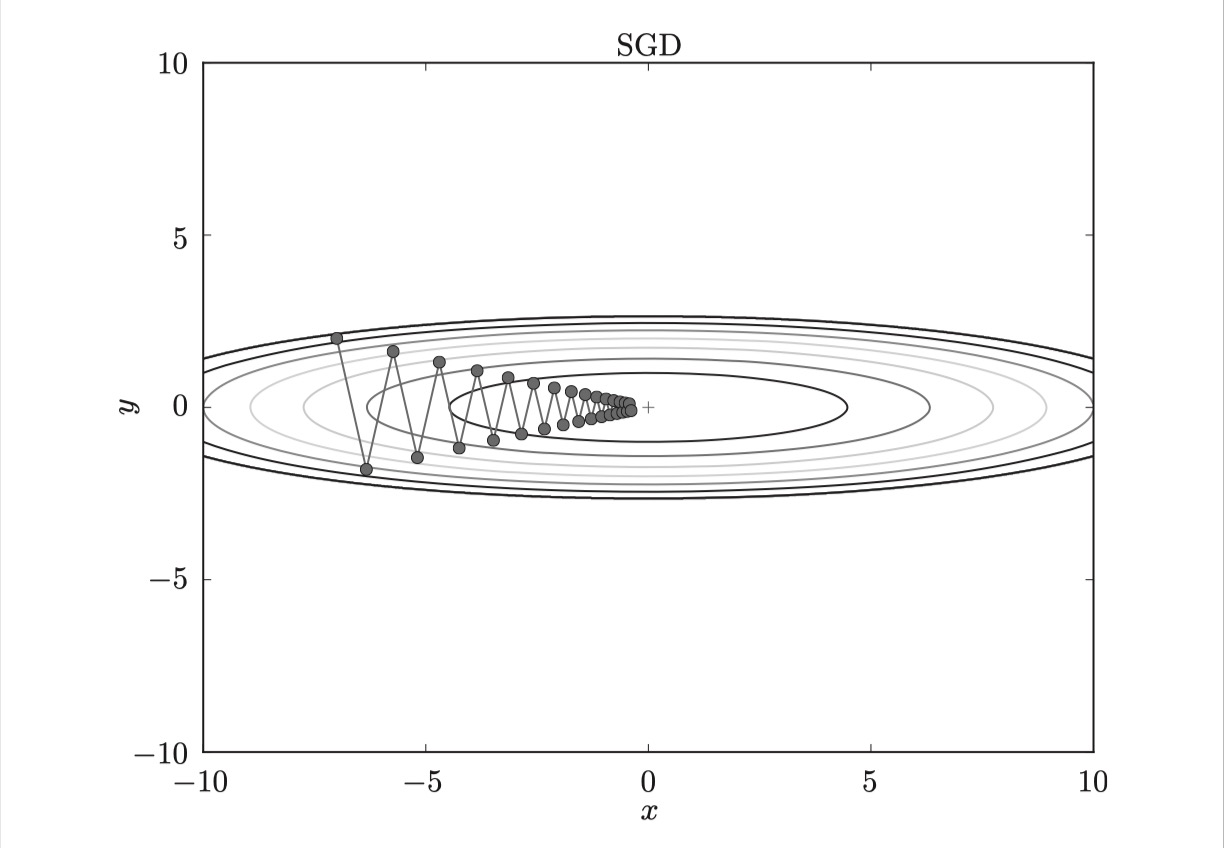
(2)容易收敛到局部最优,并且容易被困在鞍点。

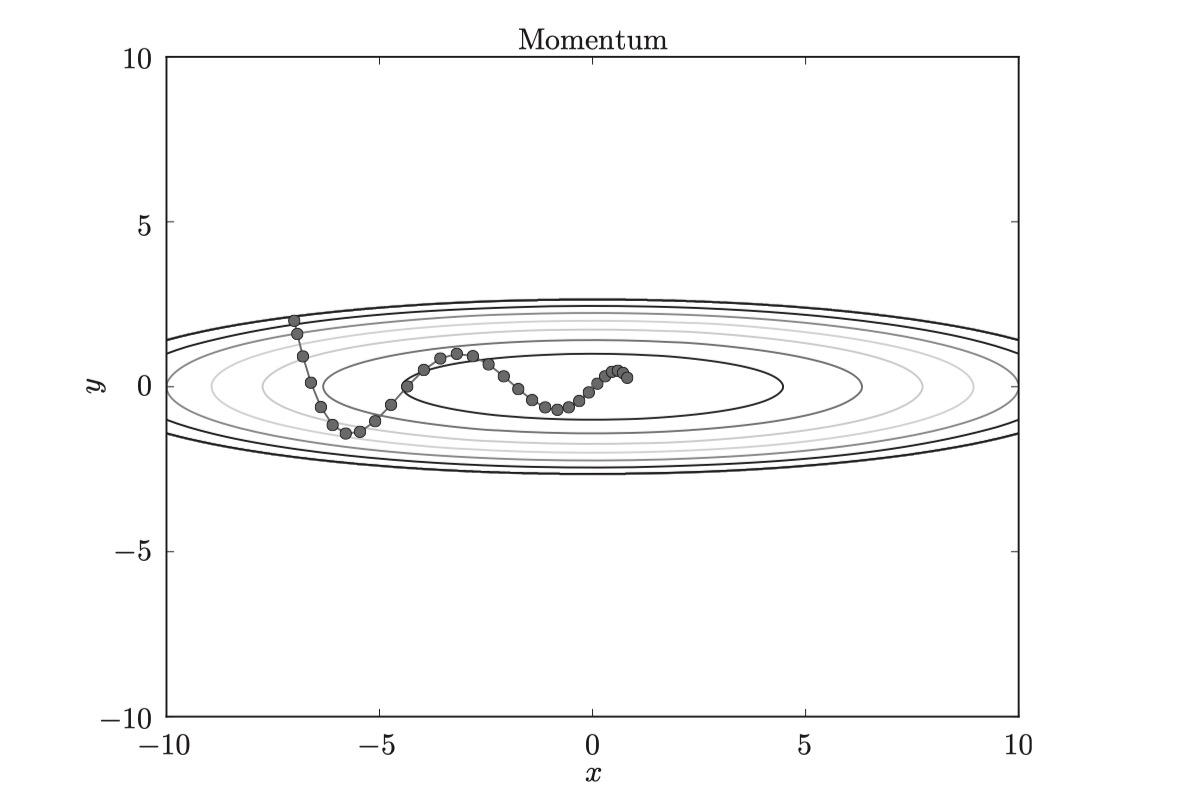
Momentum
Momentum算法借用了物理中的动量概念,它模拟的是物体运动时的惯性,即更新的时候在一定程度上保留之前更新的方向,同时利用当前batch的梯度微调最终的更新方向。这样一来,可以在一定程度上增加稳定性,从而学习地更快,并且还有一定摆脱局部最优的能力:

和前面的SGD一样, WWW表示要更新的权重参数, 表示损失函数关于WWW的梯度,ηηη表示学习率。 这里新出现了一个变量vvv,对应物理上的速度。 式(1)表示了物体在梯度方向上受力,在这个力的作用下,物体的速度增加这一物理法则。Momentum方法给人的感觉就像是小球在地面上滚动。

式(1)中有αvαvαv这一项。在物体不受任何力时,该项承担使物体逐渐减速的任务(α设定为0.9之类的值),对应物理上的地面摩擦或空气阻力。
和SGD相比, “之”字形的“程度”减轻了。这是因为虽然x轴方向上受到的力非常小,但是一直在同一方向上受力,所以朝同一个方向会有一定的加速。反过来,虽然y轴方向上受到的力很大,但是因为交互地受到正方向和反方向的力,它们会互相抵消,所以y轴方向上的速度不稳定。因此,和SGD时的情形相比, 可以更快地朝x轴方向靠近,减弱“之”字形的变动程度。
AdaGrad
在神经网络的学习中,学习率(数学式中记为ηηη)的值很重要。学习率过小, 会导致学习花费过多时间;反过来,学习率过大,则会导致学习发散而不能 正确进行。
在关于学习率的有效技巧中,有一种被称为学习率衰减(learning rate decay) 的方法,即随着学习的进行,使学习率逐渐减小。实际上,一开始“多” 学,然后逐渐“少”学的方法,在神经网络的学习中经常被使用。
逐渐减小学习率的想法,相当于将“全体”参数的学习率值一起降低。 而AdaGrad进一步发展了这个想法,针对“一个一个”的参数,赋予其“定 制”的值。
AdaGrad会为参数的每个元素适当地调整学习率, 与此同时进行学习 (AdaGrad的Ada来自英文单词Adaptive,即“适当的”的意思)。下面,让我们用数学式表示AdaGrad的更新方法。
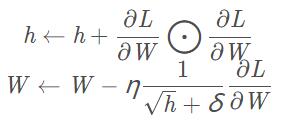
其中,hhh为梯度累积变量,它保存了以前的所有梯度值的平方和,hhh的初始值为0。⨀\bigodot⨀表示对应矩阵元素的乘法,η\etaη表示学习率,δ\deltaδ为很小的一个数值,是为了防止分母为0。然后,在更新参数时,通过乘以 1h√\frac{1}{\sqrt h}h1,就可以调整学习的尺度。这意味着, 参数的元素中变动较大(被大幅更新)的元素的学习率将变小。也就是说, 可以按参数的元素进行学习率衰减,使变动大的参数的学习率逐渐减小。
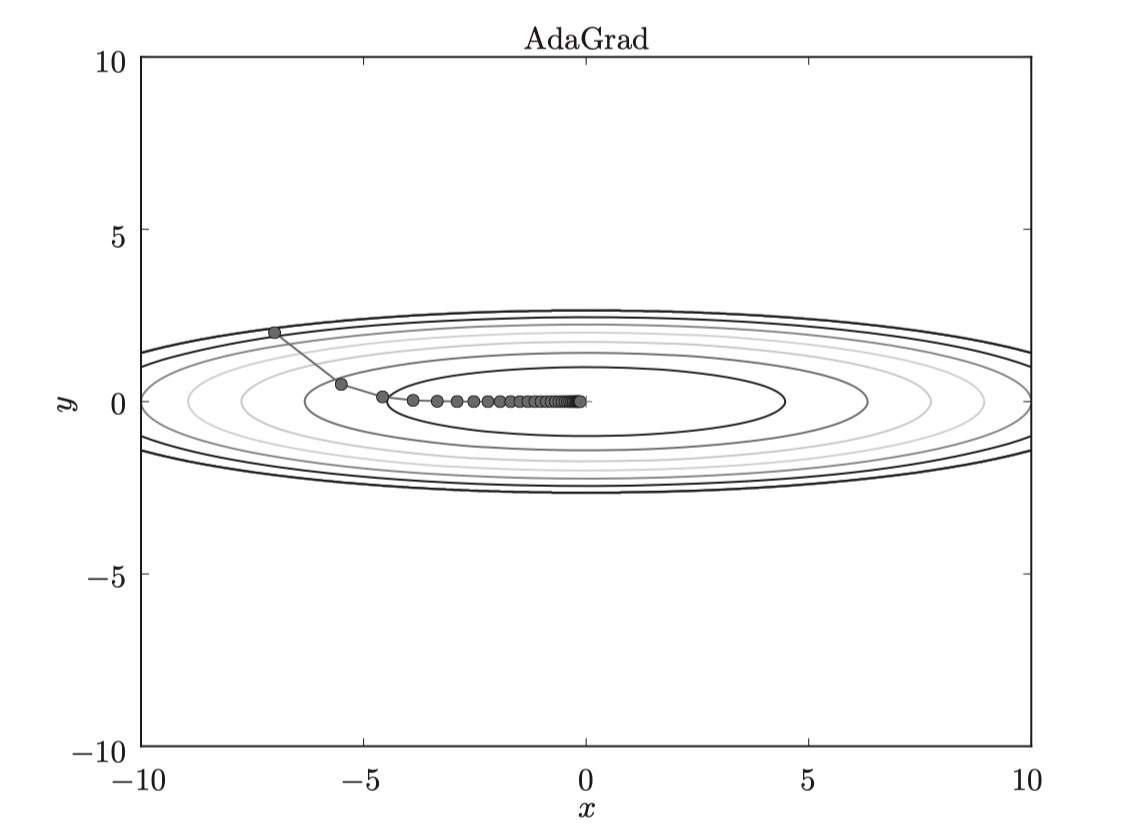
由图可知,函数的取值高效地向着最小值移动。由于y轴方 向上的梯度较大,因此刚开始变动较大,但是后面会根据这个较大的变动按 比例进行调整,减小更新的步伐。因此,y轴方向上的更新程度被减弱,“之” 字形的变动程度有所衰减。
RMSProp
AdaGrad会记录过去所有梯度的平方和。因此,学习越深入,更新 的幅度就越小。实际上,如果无止境地学习,更新量就会变为 0, 完全不再更新。为了改善这个问题,可以使用 RMSProp 方法。RMSProp方法并不是将过去所有的梯度一视同仁地相加,而是逐渐 地遗忘过去的梯度,在做加法运算时将新梯度的信息更多地反映出来。 这种操作从专业上讲,称为“指数移动平均”,呈指数函数式地减小过去的梯度的尺度。
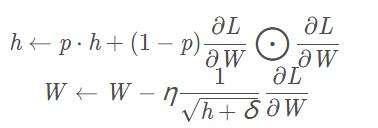
其中ppp一般可取0.9,其它参数和AdaGrad一致。
Adam
Momentum参照小球在碗中滚动的物理规则进行移动,AdaGrad为参数的每个元素适当地调整更新步伐。如果将这两个方法融合在一起会怎么样呢?这就是Adam方法的基本思路。直观地讲,Adam就是融合了Momentum和AdaGrad的方法。通过组合前面两个方法的优点,有望实现参数空间的高效搜索。此外,进行超参数的“偏置校正”也是Adam的特征。Adam结合了Adagrad善于处理稀疏梯度和RMSprop善于处理非平稳目标的优点。

可以看出,直接对梯度的矩估计对内存没有额外的要求,而且可以根据梯度进行动态调整,而−mˆtnˆt√+δ-\frac{\hat m_t}{\sqrt {\hat n_t} + \delta }−n^t+δm^t对学习率η\etaη形成了一个动态约束,而且有明确的范围。
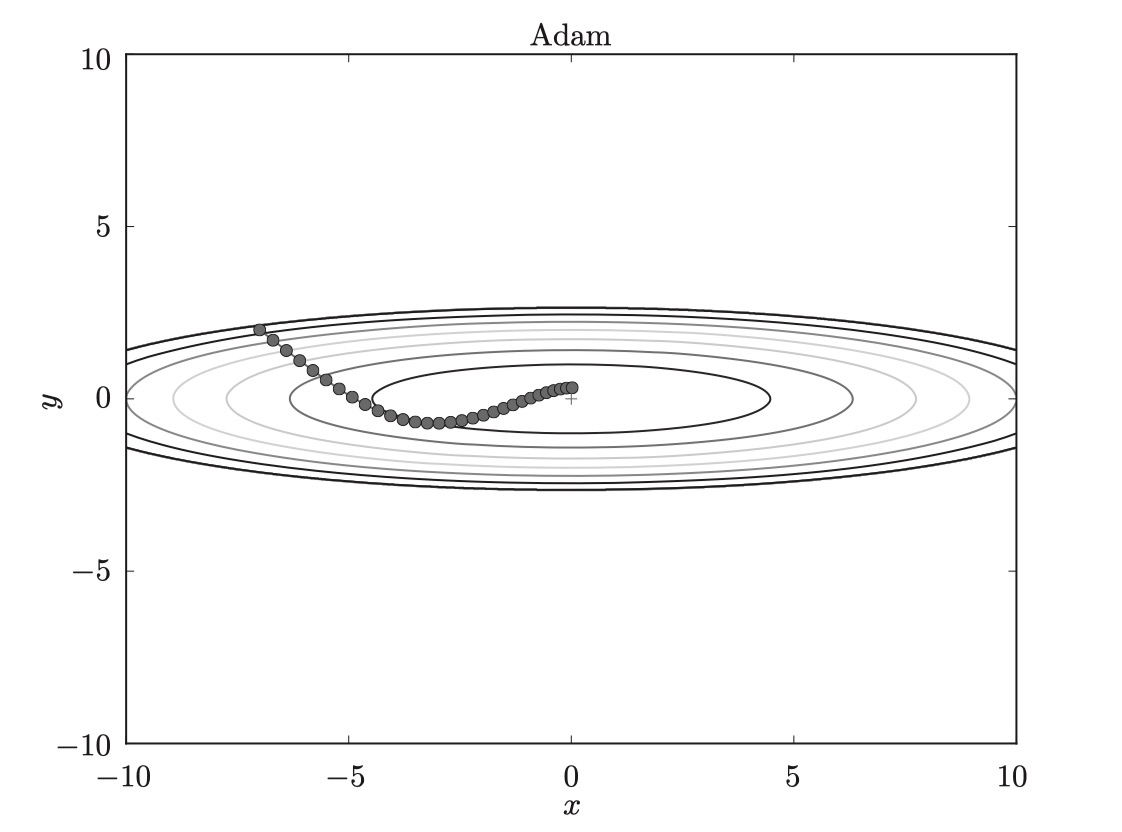
如图,基于 Adam 的更新过程就像小球在碗中滚动一样。虽然 Momentun 也有类似的移动,但是相比之下, Adam的小球左右摇晃的程度有所减轻。这得益于学习的更新程度被适当地调整了。
- 相关推荐
- 热点推荐
- 深度学习
-
Pytorch深度学习训练的方法2024-10-28 1421
-
深度学习中的时间序列分类方法2024-07-09 3361
-
C语言深度解析2023-09-28 867
-
一文详解机器学习和深度学习的区别2023-09-06 3737
-
一文读懂何为深度学习12023-02-22 988
-
什么是深度学习?使用FPGA进行深度学习的好处?2023-02-17 2160
-
深度学习技术的开发与应用2022-04-21 22567
-
基于深度学习的异常检测的研究方法2021-07-12 1757
-
解析深度学习:卷积神经网络原理与视觉实践2020-06-14 3538
-
人工智能之深度强化学习DRL的解析2020-01-24 5784
-
深度学习的改进方法2019-07-01 1454
-
一文解读深度学习的发展2018-10-05 2817
-
模型驱动深度学习的标准流程与学习方法解析2018-01-24 5599
-
一文读懂深度学习与机器学习的差异2017-11-16 3558
全部0条评论

快来发表一下你的评论吧 !
