

关于滞环电流控制和 HSA8000 控制器的基本概念介绍
电子说
描述
在去 A 化的背景下,朋友推荐给了一个国产的数字电源控制 IC—华大半导体图腾柱 PFC 控制器 HSA8000-N。它是数字模拟混合 IC,使用了开源的 RISC-V 内核,无需担心美国制裁。片上有丰富的高性能模拟和数字外设,如 ADC 采样,由事件驱动的 PWM,电网锁相环,高速模拟比较器等等。所以可以大幅度降低整个方案的外部零部件数量和系统成本,可见图一所示:
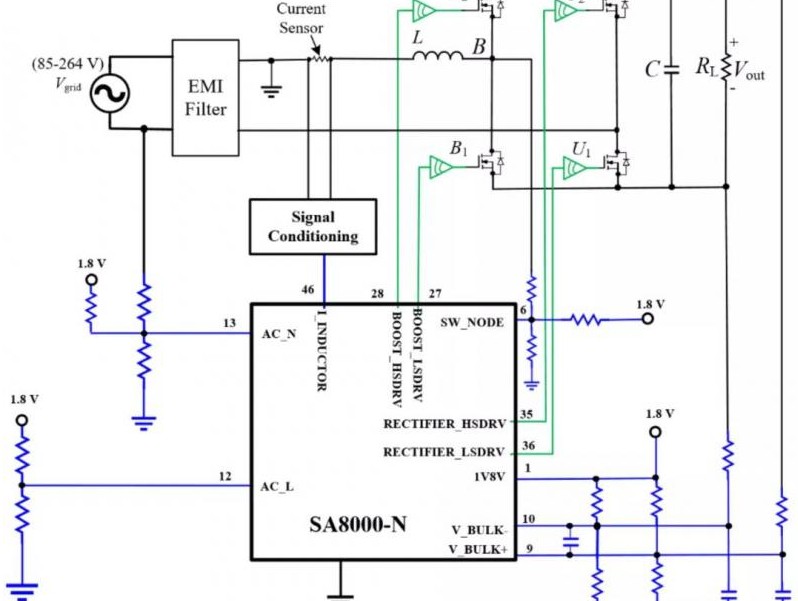
(图一 HSA8000-N 无桥图腾柱 PFC 方案)
它易于使用,无需用户编程。原厂已经写入了固件,用户只需通过 GUI 对某些控制参数进行修改,来满足项目的性能要求。由于使用数字内核,所以有较好的灵活性。它使用 CCM 和 CRM 两种控制方式用来分别优化重载和轻负载的效率,使得由这个芯片控制的 PFC 可以满足 80Plus 钛金的效率标准。
可以说是高性能服务器电源,通信电源,大功率家电的前级 PFC 部分的非常优秀的解决方案。特别是对于有需求做高效率无桥图腾柱 PFC,但是没有 DSP 控制能力的朋友来说可以算是一个福音了。毕竟 HSA8000 这个方案简单,成本低,还算是非常香的了。
而且不同于常规的 CCM PFC 使用平均电流模式控制,它使用了滞环电流控制方法。使用这种控制方法可以在一个正弦周期内来实现 CCM 和 CRM 两种工况的自然过渡,尤其是在 CRM 模式工作时。控制器设置滞环电流控制器的低端比较值为零,同时再检测高频开关节点的电压,进行综合逻辑判断后能实现 TCM 模式,实现更高的效率。示意图可见图二所示。有关图腾柱 PFC 的具体控制,将在后面的文章展开,这里只是功能性的介绍。
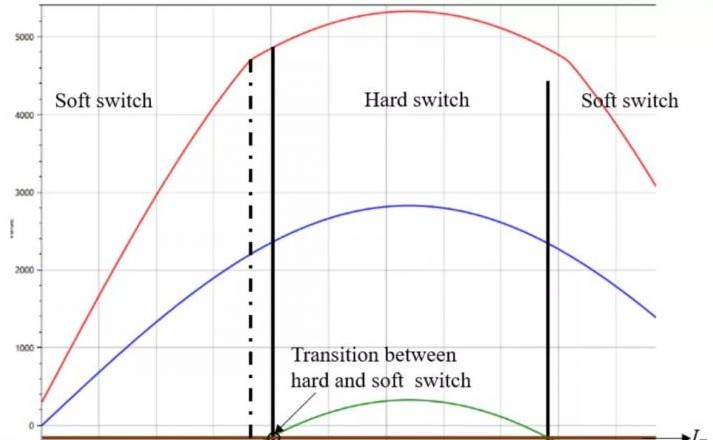
(图二 正弦周期内的 CRM 和 CCM 工况)
滞环控制也称为 bang-bang 控制或纹波调节器控制,属于 PWM 跟踪技术,它具有实时控制、响应速度快、鲁棒性强等特点,分别是:
它响应时间最快(无需计算精确的平均电流)
ADC 的精度要求低 (此架构中电流内环无需采样转换参与控制)
外接电感的精度要求低 (因为是基于纹波电流控制,电感偏移 20%问题也不大)
环路滤波算法简单 (无需计算精确的电感平均电流)
EMI 性能更好(滞环直接电流控制的自然变频)
PWM 分辨率要求低 (无需计算精确的电感平均电流)
过流保护能力强 (Cycle by cycle 比较器 limits)
更适用于 AC/DC 设计(片上有 AC 硬件锁相环锁定电网频率和相位)
拓扑的电感电流可以是连续模式运行,也可以是断续模式运行。不同于峰值电流模式,使用滞环控制时即使电感电流连续占空比大于 50%也无需斜坡补偿也能稳定工作。图三是滞环控制的实现原理,当电感电流的峰值高于控制设定值后关闭开关管,同时电感电流下降,当电感电流下降到低于控制设定值后再开启开关管。
其中(CTRL_H – CTRL_L)就是电感电流的纹波,如果通过电压外环改变电感电流控制值的大小,就可以控制流入电感的电流幅度,实现电流内环的控制。图四展示了电感电流受滞环控制值的实时限制:
(滞环控制值实时限制了电感电流)
从控制的效果来看,由于滞环控制每个周期都控制了流入电感的电流,因此在控制模型的角度来看,也应该同于其它电流模式的分析方法。也可以把电感看成可控电流源,从而简化系统的控制模型,降低为一阶系统,更易于控制和稳定。图五是通过在滞环控制值上注入扰动,测试的频率响应。从幅频特性图来看,滞环电流控制的功率级电流内环呈一阶模型,易于控制和稳定,与峰值电流模式相似。
( 滞环控制的频率响应分析)
但是它的控制方法可以归为非线性控制范围,没有传统 PWM 的载波和调制的概念。在定频 PWM 工作时,电感电流的纹波只和电感量和负载电流有关系。但是滞环控制还会因为电感电流纹波的大小反应到开关频率的变化范围上。因此为了简化磁件设计,缩窄频率变化范围,建议还是使用较小的电感电流纹波值。为了实现滞环控制,还需要准确的监测电感电流的峰值和谷值,如果是使用 ADC 来做模数转换就很难实现这种控制方法。因此滞环控制的实现必须是基于高速模拟比较器才行,能准确的判断出电感电流的峰值和谷底点。华大半导体的 HSA8000 图腾柱控制器就集成有高速模拟比较器,可见图六所示。用来判断电感电流的峰值和谷值点,产生两个状态标志位,PWM 控制器内部有状态机用来实现滞环控制方法。
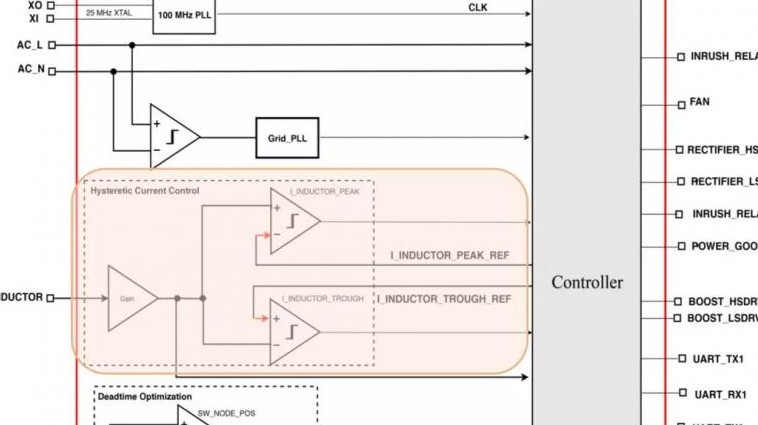
内置有两个模拟比较器
在上文中我们已经知道滞环控制的实现方法,可以在仿真软件中用 SR 触发来实现这个逻辑,可见图七所示。当电感电流大于峰值设置后,SR 触发器拉低 Q 输出,当电流低于谷底设置后 SR 触发再拉高 Q 的输出。如果是互补的 PWM 就可以使用 Q 非,其逻辑的实现不在累述。
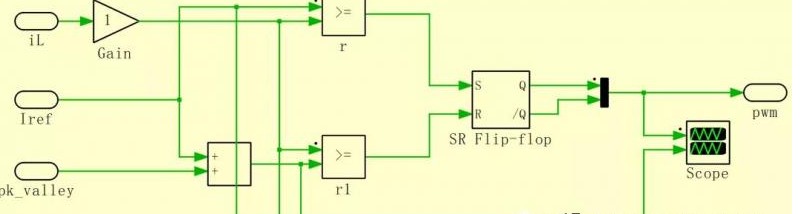
滞环控制的仿真实现
实现的逻辑可见图八:
滞环控制的仿真波形
因此可以搭建一个同步 BUCK 供测试和分析滞后电流控制模式的性能,其模型可见图九:
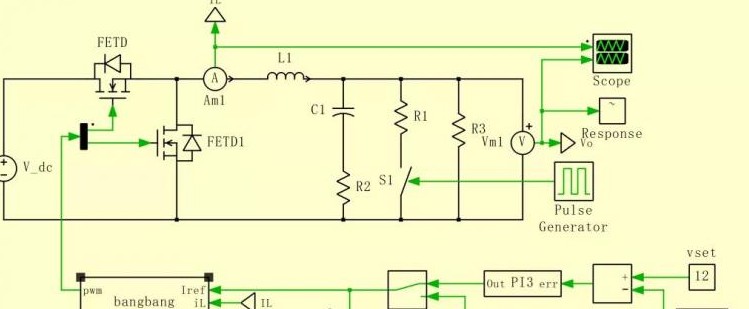
由滞环电流模式控制的 BUCK 变换器
首先进行动态响应测试,测试负载从 10% ~ 90%的变化,输出电压的过冲和下冲的值仅为 0.8V,约为输出电压的 6.6%。说明滞环电流模式的调节速度和稳定性都非常不错,可见图十。
( 滞环电流控制的动态响应测试)
小结:
简单的介绍了滞环电流控制和 HSA8000 控制器的基本概念,控制方法的仿真实现和动态性能测试。经过测试发现滞环电流控制的响应速度和稳定性都非常不错,是一种优秀的控制方法。
责任编辑:pj
-
组合逻辑控制器的基本概念、实现原理及设计方法2024-06-30 4562
-
同步降压滞环调节器控制器TPS5615数据表2024-04-11 498
-
微控制器的基本概念、特点、分类及应用领域2023-09-25 6630
-
永磁同步电机PMSM电流滞环控制理解2023-03-15 1043
-
FOC控制的基本概念2021-09-07 2318
-
阻抗控制相关的基本概念2021-02-25 2337
-
基于不定频滞环空间电压矢量的有源滤波器电流控制策略研究2017-01-07 984
-
使用矩阵变换器的永磁同步发电机电流滞环控制系统2017-01-02 1138
-
滞环电流控制参考程序2015-08-14 5447
-
LED恒流驱动芯片的滞环控制电路2011-12-29 4806
-
逆变器单极性电流SPWM控制与滞环控制比较2011-09-22 2325
-
PMSM电流滞环控制仿真分析2011-08-25 1501
-
滞环电流模式控制PWM2011-08-09 4008
-
电力有源补偿及滞环电流跟踪控制研究2009-11-13 1648
全部0条评论

快来发表一下你的评论吧 !
