

KUKA C4机器人的功能分析
描述
通过 PROFINET 进行电源管理,这个千万不能和机器人节能功能混为一谈!

以下信号可供用于激活或停用各种节能模式以及识别机器人控制系统的状态。
这些功能只能在 EXT 运行模式下执行,而不能在 T1 或 T2 下执行。
无法将 PROFIenergy 与电源管理组合。
电源管理指的不是 PROFIenergy。
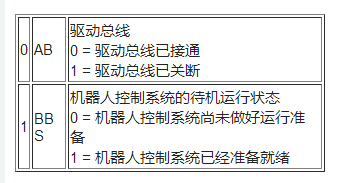
输入字节 0

输出字节 0
电源管理信号在目录:
C:KRCROBOTERConfigUserCommon 下的文件 CabCtrl.xml 中进行配置。
运作方式
控制外风扇
<!-配置说明:->
<!-要在总线上放置信号或从总线上读取信号,相应的 -="">
<!-可以激活和配置功能。-="">
<!-不能删除或添加任何节点或参数。-="">
<!-<版本>,并且所有节点的顺序均不得更改。->
<!-可以根据->使用节点中下面列出的所有参数。
<!-要求已更改。-="">
<!-设置。-="">
<!-已激活|在|打开整个功能。-="">
<!-|关|关闭整个功能。-="">
<!-驱动程序|驱动名称在krc4中操作总线的驱动程序名称。-="">
<!-bus网络|网络名称|驱动程序内的总线实例的名称。-="">
<!-位偏移 -="">
<!-| -="">
<!-监视|在|打开监视。-="">
<!-|关|关闭监视。-="">
<!-总线系统|驱动名称网络名称->
<!---------------------------------------------------->
<!-profinet pniodriver="" pnio-ctrl-="">
<!-| pniodriver="" pnio-dev-="">
<!-interbus ibusdrv="" ibs1-="">
<!-profibus(带有| ethercat="" sys-x44_pb-master1-="">
<!-pb网关)| ecatiodriver="" 1-="">
<!-devicenet(带有| ethercat="" sys-x44_dn-master1-="">
<!-dn网关)| ecatiodriver="" sys-x44_dn-slave1-="">
<!-ethercat ecatiodriver="" sys-x44-="">
E249-E256ENERGYMM是机器人电源控制
-
KUKA重型机器人2015-02-03 8301
-
KUKA机器人问题解答2019-07-15 2614
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12382
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10898
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8010
-
机甲大师机器人控制(二):功能分析 精选资料推荐2021-08-18 1866
-
库卡机器人MGV电源模块维修2021-09-08 1870
-
KUKA机器人伺服驱动模块维修2021-09-17 1872
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3877
-
库卡机器人基础教程和库卡C4编程指南及焊接机器人教程合集免费下载2019-04-22 5548
-
KR C4机器人和LBR iiwa机器人的不同之处2019-07-08 2693
-
库卡机器人有限公司培训资料之库卡机器人编程C4教程2021-11-05 1664
-
KUKA库卡机器人MGV电源模块维修PH1013-28402022-01-12 1654
-
KUKA C4机器人报:KSS13012<{总线识别号}>ECat Stack初始化时出错2022-03-17 9725
-
KUKA8.2系统下C4机器人虚拟外部轴E1的设置深层分析2022-11-29 2721
全部0条评论

快来发表一下你的评论吧 !
