

KUKA机器人电伺服焊钳时是如何进行焊钳力的控制
描述
我们在学习KUKA机器人电伺服焊钳时是如何进行焊钳力的控制,进行加紧的呢?
以下是焊钳在执行力时进行的加紧力控制!
例:
GLOBALDEF SGM_MOVE_TO_FORCE (FORCE :IN, MovementType:IN, GunClosingReason:IN, SGEQ_ParamSet:IN, SGRS_ParamSet:IN )
移动焊钳到使用力
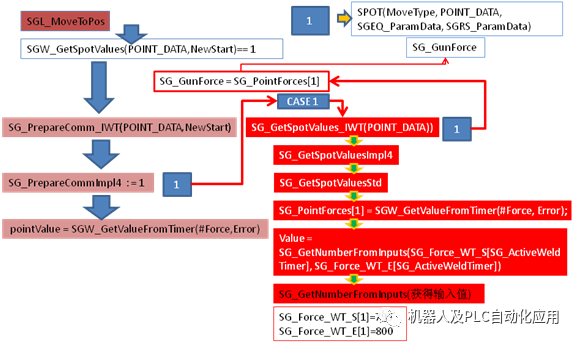
力值的给入时序图:
IF(ServoGun[SG_ActiveGunNumber].GunControl == #Force)THEN
由于ServoGun[1]= #Position所以不执行力模式
ACTIVATE_FORCE_MODE((6+SG_ExtaxActive), FORCE, SGL_CalcPartPos(SG_CurrentCmd),SGEQ_AFM_ConstSpeedUser)
ENDIF
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- KUKA机器人
-
机器人焊接技术在车身焊接工艺的应用2018-11-01 2649
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8003
-
KUKA机器人伺服驱动模块维修2021-09-17 1867
-
电伺服焊钳铣削分析:用户铣削2020-06-11 3664
-
FESTO气伺服焊钳气管接错后故障分析2020-07-13 3443
-
简述KUKA外部轴的几种应用2020-08-10 3110
-
简单介绍KUKA外部轴应用2020-10-27 3313
-
KUKA机器人焊钳铣削清零方式2021-06-18 4311
-
电伺服焊钳的摆臂铣刀的SG_Background控制2022-07-26 1674
-
FESTO焊钳故障报警分析2022-08-15 2876
-
KUKA机器人组态电伺服焊钳应用2022-09-20 1200
-
浅析KUKA机器人气伺服焊钳虚拟外部轴的配置文件2022-11-10 1947
-
VASS KUKA电伺服焊钳的SG_Background控制2023-01-14 2637
-
对齐X型气动焊钳上的扁平电极臂及更换极臂.2023-03-02 1932
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1775
全部0条评论

快来发表一下你的评论吧 !
