

三大PID控制算法的C语言实现方案
电子说
1.4w人已加入
描述
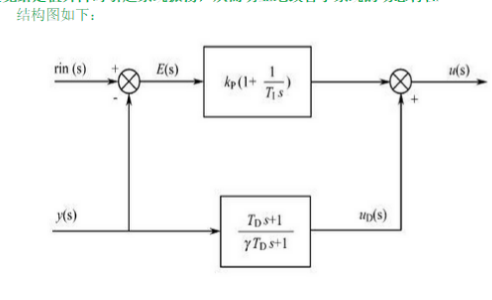
(1)微分先行PID控制算法
微分先行PID控制的特点是只对输出量yout(k)进行微分,而对给定值rin(k)不进行微分。这样,在改变给定值时,输出不会改变,而被控量的变化通常是比较缓和的。这种输出量先行微分控制适用于给定值rin(k)频繁升降的场合,可以避免给定值升降时引起系统振荡,从而明显地改善了系统的动态特性
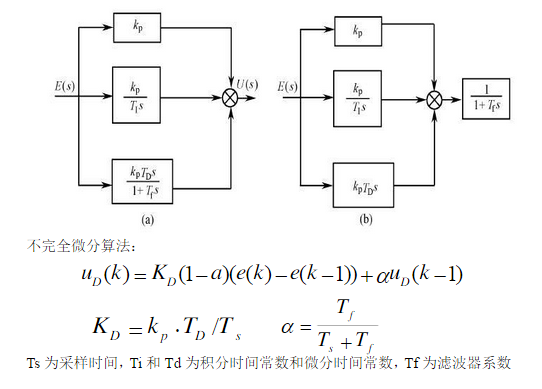
(2)不完全微分PID控制算法
在PID控制中,微分信号的引入可改善系统的动态特性,但也易引进高频
干扰,在误差扰动突变时尤其显出微分项的不足。若在控制算法中加入低通滤波器,则可使系统性能得到改善
不完全微分PID的结构如下图。左图将低通滤波器直接加在微分环节上,右图是将低通滤波器加在整个PID控制器之后
(3)带死区的PID控制算法
在计算机控制系统中,某些系统为了避免控制作用过于频繁,消除由于频繁动作所引起的振荡,可采用带死区的PID控制算法,控制算式为:
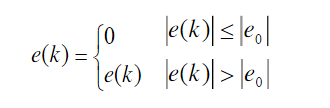
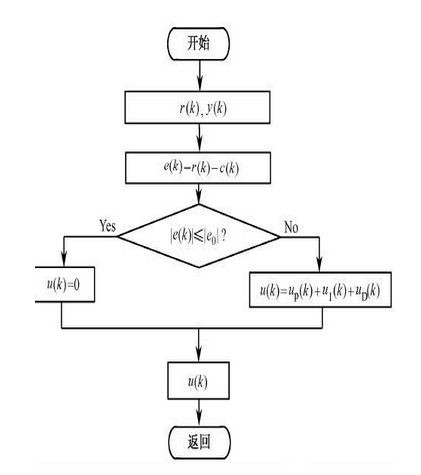
式中,e(k)为位置跟踪偏差,e0是一个可调参数,其具体数值可根据实际控制对象由实验确定。若e0值太小,会使控制动作过于频繁,达不到稳定被控对象的目的;若e0太大,则系统将产生较大的滞后 控制算法流程:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
PID控制算法的C语言实现2022-01-13 1679
-
如何使用C语言实现模糊PID控制?2021-09-24 2789
-
什么是PID控制算法?PID控制算法C语言是如何实现的?2021-06-29 2420
-
如何使用C语言实现PID控制算法2020-09-21 1464
-
使用C语言实现51单片机中的PID算法代码免费下载2019-09-25 1403
-
PID控制算法原理是什么?pid控制算法的c语言实现介绍和测试代码概述2018-08-23 3425
-
PID控制算法的C语言实现(完整版)2016-11-05 1345
-
PID控制算法的C语言实现(完整版)2016-08-09 1239
-
C语言实现PID算法2015-11-24 722
-
最全PID控制算法的C语言实现(转)2015-06-01 87649
全部0条评论

快来发表一下你的评论吧 !
