

为什么P参数不需要动态都可得到很好的效果?
电子说
描述
来源:卓晴
01问题提出
卓大大,我有一个问题想要请教。对于舵机的转向控制,高速的时候需要动态P才能得到平滑的控制效果(也就是偏差越小P越小,偏差越大P越大)。
但对于电机的速度控制,在任何期望速度下,P参数不需要动态都可得到很好的效果,请问这个如何用理论解释?是因为电机的惯性比较大吗?
▲ 车模在不同速度下运行出现的振荡
02理论分析
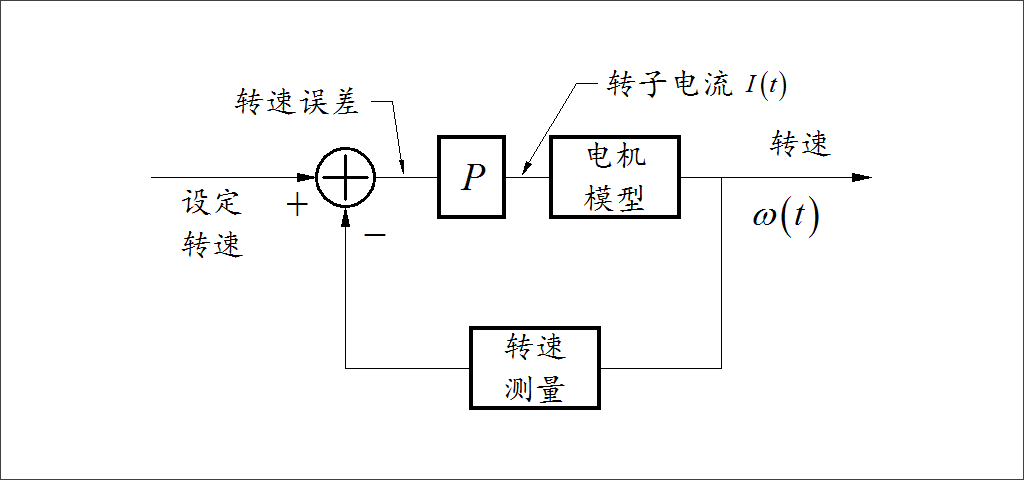
对于电机转速 控制,如果采用电流串激闭环控制(这样建模分析比较简单),电机的转速 的加速度正比于转子力矩,转子的力矩正比于转子电流。因此如果控制速度环控制率采用比例控制,整个系统就是一个典型的二阶控制系统。在电机带有阻尼负载(即力矩与转速成正比),该系统可以稳定,并且稳定性与转速无关。这是因为整个系统反馈控制比例控制增益与转速没有关系。
对于车模在赛道上循迹运行控制时,舵机的输出正比于车模前轮的转角 。前轮转角相对于车模位移 积分就形成车模与赛道线中心的偏移量 :

而位移 是车模速度 的积分:

将(2)式代入(1)可以得到:

分析(3)可以看到,相对于舵机输出角度 对于车模偏移量影响是一个积分关系,其中积分项系数包括 ,这一项与速度成正比。如果同样使用比例负反馈来对车模偏移量进行控制的话,反馈比例系数与车模运行速度成正比。这一点与前面电机控制是不同的。
下图显示了车模运行速度 为恒速 时,车模的偏移量与舵机输出转角 之间的关系。
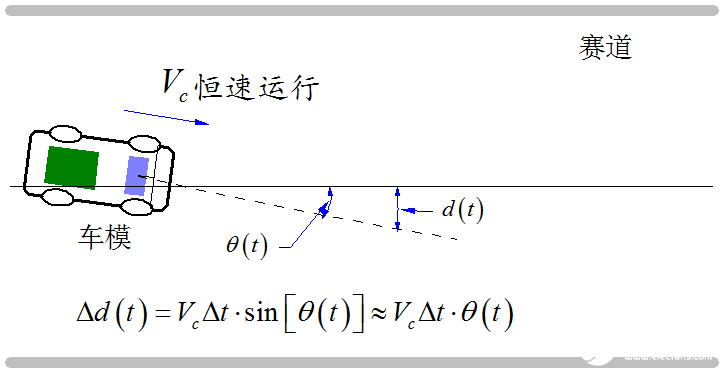
▲ 在恒速下,车模的偏移量与舵机输出转角之间的关系
考虑到车模的惯性以及舵机执行过程的延迟等特点,当车模方向控制比例超过一定限度后,方向控制就会变得不稳定了。
由此,可以知道车模方向比例控制的时候,需要根据车速调整比例系数。
▲ 车模在转弯过程中的动态特性
03仿真实验
由于舵机输出转角的转动速度是有限值,而且近似为 一个恒速转动,这是一个非线性的环节。为了简化分析,下面将舵机简化成一个纯延迟环节。比如延迟100ms。将这个延迟环节重新增加在上面的仿真系统中,就会发现,随着比例控制的增加增加,系统的单位阶跃响应就会变得不稳定。
▲ 带有纯延时环节的一阶积分环节的比例控制
通过上面的仿真可以看出,比例增益过大会使得系统变得越来越不稳定。根据02节叙述的,车模方向控制的比例系数是与车速成正比,所以当车速增加时,车模运行就会变得原来也不稳定了。
04如果解决方向不稳定?
解决车模方向控制不稳定的方法:
动态调整控制参数,比如车速增加时,需要适当减少P的大小,从而抑制振荡的产生。这种方法在直道运行是比较有效果,但在弯道时,车模轨迹就会距离赛道中心线有较大的偏差。
通过增加赛道检测的 前瞻距离,也就是将车模相对赛道的偏差位置尽可能往前移,这样就可以抵消舵机执行过程中所带来的时间延迟。使用摄像头可以有效提高赛道前方检测的距离。
通过机器学习的方法进行赛道预测。由于赛道元素的组合是有限的,并且是提前公布的。可以通过机器学习的方法将赛道偏移控制信息存储在人工神经网络中,来提高控制的精度。比如今年AI电磁组,虽然赛道检测的电感传感器非常短,但是经过机器学习也可以获得与摄像头相近的性能。
提高舵机的性能。舵机的惯性(延迟)是造成方向控制不稳定的内因。可以适当通过改造舵机输出机械连杆,增加它的机械传动比例,可以在一定程度上提高车模控制的快速性。
在控制算法中引入微分量,来抑制振荡的现象。
下图是通过在控制环节中引入微分控制项,可以看到微分系数在一定范围内可以减少系统输出的振荡。但是当微分系数过大时,也会引起系统的不稳定性。
▲ 增加控制中的微分项,在一定参数范围内可以抑制振荡
参考资料
[1]劈-I-D: https://zhuoqing.blog.csdn.net/article/details/104134875
-
CST微波工作室S参数不需要计算那么多怎么设置2019-03-13 6093
-
开漏模式时,读输入数据寄存器时可得到I/O口状态不是很懂2020-03-23 2321
-
不需要场效应管的多路传输开关2009-04-13 1114
-
NBIoT智能门锁,真正不需要网关的智能门锁2020-06-22 9788
-
DN175-离线低噪声电源不需要滤波即可满足FCC排放要求2021-04-27 719
-
不需要电感器2021-04-29 897
-
ADISUSB驱动程序文件(大多数情况下不需要)2021-06-07 804
-
对讲机到底需不需要中继台?2023-03-15 4759
-
六类屏蔽网线和六类非屏蔽网线都不需要接地吗2024-03-08 7049
-
网线那几根线不需要2024-09-04 6659
-
“不需要点表的工业网关” 深控技术物联网解决方案2024-09-29 1376
-
C语言为什么不需要包含stdio.h2024-10-29 1798
-
5G不需要点表的工业网关是什么,5g不需要点表的工业网关生产厂家有哪些?2025-01-07 902
-
深控技术不需要点表的工业数采动态产线重构支持方案2025-03-18 918
-
系统c盘满了怎么清理不需要文件2025-11-22 1285
全部0条评论

快来发表一下你的评论吧 !
