

在STM32H743芯片上实现CAN通信的步骤
描述
1. 摘要
本篇笔记主要介绍,在STM32H743芯片上实现CAN通信,封装为BSP驱动,为之后实现CAN的高层通信打下基础。
2. 准备工作
1, IAR 8.32.1
2, STM32Cube_FW_H7_V1.6.0
3. 简介
STM32H743的控制器局域网络 (CAN) 子系统由两个 CAN 模块、一个共享消息 RAM 存储器和一个时钟校准单元组成。关于这四个组成部分的基址,请参见存储器映射。两个 CAN 模块(FDCAN1 和 FDCAN2)均符合 ISO 11898-1: 2015(CAN 协议规范第 2.0 版A、 B 部分)和 CAN FD 协议规范第 1.0 版。此外,第一个 CAN 模块 FDCAN1 支持 ISO 11898-4 中规定的时间触发 CAN (TTCAN),包括事件同步时间触发通信、全局系统时间和时钟漂移补偿。FDCAN1 还额外包含专供时间触发功能使用的寄存器。CAN FD 选项可与事件触发和时间触发 CAN 通信一起使用。10 KB 的消息 RAM 存储器可实现过滤器、接收 FIFO、接收缓冲区、发送事件 FIFO、发送缓冲器( TTCAN 触发)功能。该消息 RAM 在 FDCAN1 和 FDCAN2 模块之间共用。通用时钟校准单元是可选的。通过评估 FDCAN1 接收到的 CAN 消息,该单元可基于 HSI 内部 RC 振荡器和 PLL 为 FDCAN1 和 FDCAN2 生成经过校准的时钟。
CAN 框图

CAN的底层大部分ST已经在HAL库里面封装好,如果你细看HAL源码,搞懂这张图,H743的CAN 你基本上就没有问题了,在结合HAL库的学习。
4. 驱动实现
良好的驱动封装,可以方便应用开发,并且可以容易移植到其他项目,代码重用率高,所以数据和接口是你不得不考虑的问题,怎么样方便的实现,还要通用易用。
4.1 数据封装
首先根据stm32h7xx_hal_fdcan.h文件我们来封装两个个结构体,方便后面软件实现开发,可以新建bsp_can.c和bsp_can.h, 在头文件中封装结构体定义。

在.c文件中定义封装一些变量,这些变量数组也是通用,在多款产品中都采用,大家也可以参照。

可以实现多个CAN口驱动。如果只有一个CAN口,将CAN_PORTS宏定义为1,几个就定义为几。
这个封装大家可以记着,我在多款器件上都是这么封装的,之前在NXP的KE06, KEA, KV46, K64等系列,在ST的F103, F446, H743等等CAN通信都采用这种封装BSP驱动。
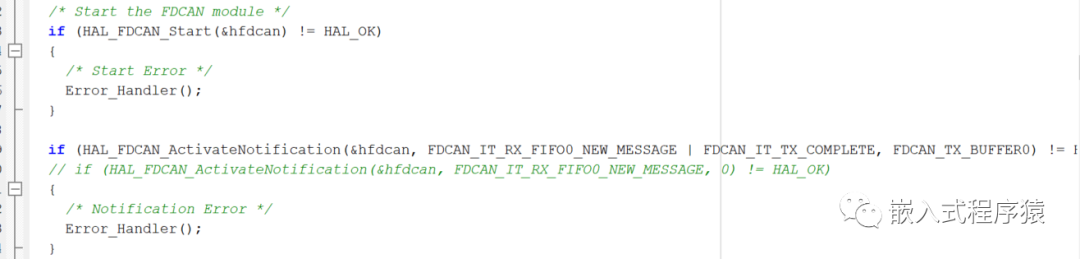
4.2 初始化
参考官方的例程,根据自己的硬件去实现,做相应修改。例程中只使能了接收中断,我们一般发送也要采用中断,所以也要开发送中断,根据实际可能还需要添加滤波,配置缓冲等。

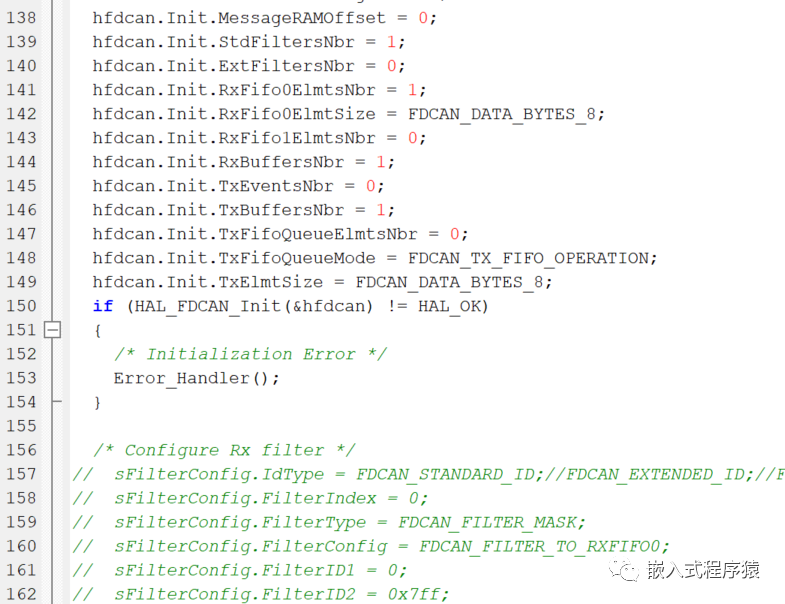
配置时钟管脚,中断。


4.3 中断回调函数
最主要的就是接收和发送的回调函数的实现,首先来看接收中断回调函数。

发送完成回调函数

4.4 测试代码
在freeRTOS下建立一个CAN通信的简单测试任务,实现收到什么在发送出去。


在10ms的任务里去调用这个测试函数,实现收发测试。
测试的可以这样写,正式的我们需要解析收到的内容,并且重新组织发送的帧,这些解析和重组我们将会在高层的协议驱动文件中实现,有了这个驱动就可以实现CANopen, J1939, DeviceNet等CAN的高层协议了。
5. 测试
测试,扩展帧,500k 位速率,发送数据 aa,01,02,03,04,05,06,bb。板卡收到电脑发送的数据后,回送给电脑。发送100000次, 10ms一次。使用USB-CAN连接到电脑端测试。
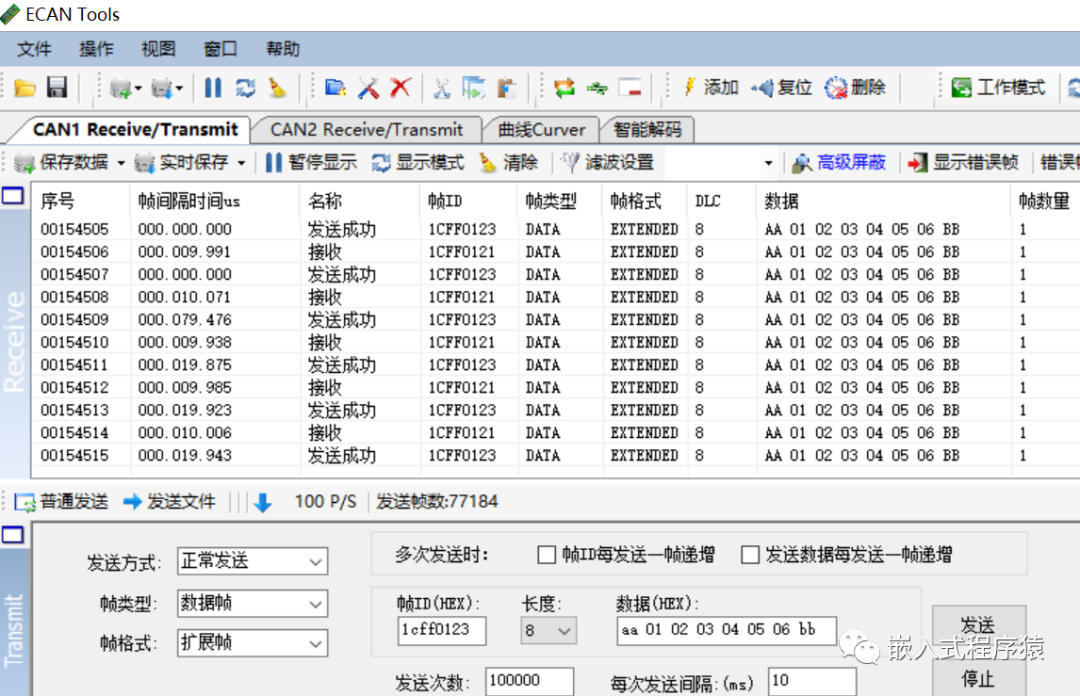

至此我们的CAN通信BSP驱动封装就验证完成,可以轻松移植到其他板卡上。关注我,为您带来更多精彩内容
- 相关推荐
- 热点推荐
- CAN通信
-
STM32H743以太网与高速USB同时工作遇到的疑问求解2024-04-09 967
-
STM32H743怎么在FreeRTOS中移植canopen?2024-07-03 876
-
在STM32H743芯片上实现CAN通信2021-08-20 2716
-
STM32H743 Flash用来存什么2021-09-24 2262
-
NUCLEO STM32H743怎么使用?2021-11-08 1845
-
如何对STM32H743的两路can进行配置呢2021-11-18 2670
-
stm32h743板子有哪些功能呢2022-02-11 1679
-
请问如何用STM32cube实现STM32H743的USB驱动?2022-02-22 1297
-
如何调试STM32H743的两串口?2022-02-28 1645
-
RT-Thread文件系统组件在STM32H743上的应用2021-12-05 1262
-
stm32h750/stm32h743原理图和pcb源文件2021-12-08 4154
-
stm32h743外部RAM非字节对齐访问,引起的hard fault2021-12-09 1042
-
用STM32cube实现STM32H743的USB驱动2021-12-28 3032
-
stm32h743软件模拟i2c驱动2022-12-01 983
-
STM32H743的FDCAN发送线程卡死的处理方法2023-10-12 7042
全部0条评论

快来发表一下你的评论吧 !
