

机器人技术的可重复性和准确性分析
机器人
描述
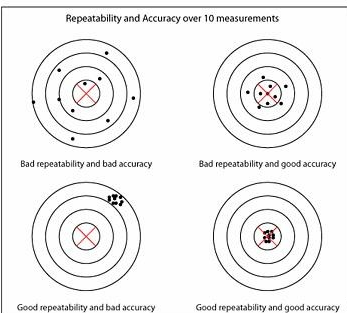
工业机器人具有许多度量或可测量的特征,这将直接影响机器人在执行任务期间的效率。可测量特性主要指的是可重复性和准确性。简单地说,机器人的可重复性可以定义为重复执行同一任务的能力。准确性是指所请求任务与机器人实际完成的任务之间的差值。在机器人技术中,当谈到可重复性和准确性时,它们的含义经常会混淆。
首先,让我们介绍一下机器人的主要特征,其重复性和准确性。主要从路径、位置和方向三个方面来评估。这些是确保每次使机器人和末端执行器运动时都能实现的因素。位置和方向与机器人末端执行器的结合被称为姿势。此外,由于其固有的运动是动态特性,姿势精度通常将对路径精度产生一些影响。但是,为了避免在这里造成混淆,我们将集中讨论静态特性而不考虑运动效果。因此,这里将仅讨论姿势精度和可重复性。机器人的姿势精度和可重复性分为:位置和方向。
绝对位置精度是机器人以最小的误差到达特定编程位置的能力。请注意,此处我们使用“绝对”一词来表示相对于唯一参考系(主要是工作参考系(或世界参考系))评估位置精度的事实。通常,这些是专门用于测量位置精度变化的任意参考系。为了评估机器人运动的静态精度,需要用到位置测量。
在几何上,机器人在给定位置上的位置精度可以定义为所需位置与质心位置之间的距离。质心是指所有坐标方向上所有点的平均位置,这是在重复进行后实际达到的末端执行器向原始所需位置移动。在数学上,绝对精度是针对x,y,z笛卡尔位置误差中的每一个的组合误差的汇编。最后,特定工作空间的机器人位置精度,可以描述为在预定工作空间或参考框架内,均匀分布的几个位置可用的最大合成误差。
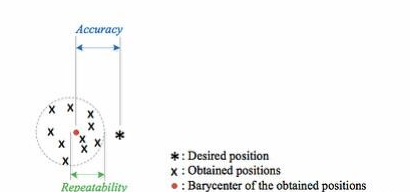
可重复性定义为,机器人的末端执行器在同一受控位置上,达到多个位置之间一致的近似程度。在几何上,位置可重复性可以定义为最小球体的半径,该球体包含为同一请求位置到达的所有位置。
总而言之,不要将工业机器人的准确性与可重复性混淆。可重复性指的是工业机器人一遍又一遍地执行相同的任务,而准确性指的是工业机器人每次都能达到目标。
-
工业机器人的特点2025-07-26 4463
-
精密高压开关:实现安全、可靠性和可重复性 (一)2024-12-05 954
-
探讨生成式AI与机器人技术中的未来2023-12-27 551
-
协作机器人的秘密武器,赋予机器人接管重复性任务的能力2023-02-07 1112
-
计量标准的重复性考核要求2022-03-18 5110
-
PGA-SAR系统无法达到12比特级别的可重复性时,Δ-Σ系统会怎么样呢?2021-04-07 1162
-
计量标准重复性的测量方法2020-11-12 23492
-
银行智能机器人的功能有哪些2020-06-02 8020
-
机器人准确性如何2019-08-09 1407
-
并行传感器如何提高倾斜测量的精度和可重复性2018-07-11 3931
-
智久AGV搬运机器人呼唤更多中国籍的机器人2015-12-17 5307
-
工业机器人的四大核心部件2015-02-12 20684
-
相控阵探头的重复性与可靠性2010-03-20 652
-
测量系统的的重复性和重现性2009-08-16 1508
全部0条评论

快来发表一下你的评论吧 !
