

对面向智能仿生感知系统的柔性人工突触器件进行了深入探索
描述
人工智能技术的发展为人机交互、仿生感知系统及智能机器人等领域的发展带来了革命性变化,同时对复杂数据的处理和人机交互界面提出了新的要求。不同于目前基于软件系统和冯·诺依曼构架计算体系实现的神经网络,人脑运算方式具有高效率和低功耗的特点,因此,通过人工突触器件的制备,在硬件层面上模拟人脑的神经拟态器件,对构建新的计算系统具有重要意义。此外,由于人工突触器件能够将传感器信号转变成类神经信号,有望实现与生物神经信号的兼容,构建智能、高效的人机交互界面。因此,人工突触器件在仿生感知领域也受到了广泛关注。随着研究的深入,虽然器件的工作原理得到了一定解释,相关材料、制备工艺和器件结构也不断得到优化,但是,目前大多数研究均聚焦于器件对生物突触功能的模拟,对于仿生感知系统所必要的信息感知-信号传递-信息处理系统的构建尚处于初步阶段,其次,基于硬质衬底上制备的人工突触器件也无法满足与生物体等柔性系统兼容的需求。
针对上述问题和需求,中国科学院苏州纳米所的张珽研究团队分别从信息感知-信号传递-信息处理角度出发,对面向智能仿生感知系统的柔性人工突触器件进行了深入探索并取得了系列研究成果。
视觉作为生物获取外界信息的重要感知系统,对生物活动具有重要意义,传统的人工突触器件通常需要通过连接传感器来模拟神经感知系统的生物学功能,造成了硬件冗余、功耗和延迟,因此,受到蜜蜂视觉系统的启发,本研究使用氧化锌纳米线和海藻酸钠设计制备一种具有光感知功能的柔性仿生突触晶体管,集成了视觉感知和信息处理的功能,器件同时对电信号和光信号刺激响应的特点,可以在电信号和光信号的共同作用下,实现短时突触可塑性与长时突触可塑性的转换。此外,通过对此突触晶体管器件的阵列化制备,实现了在不同电压下光信号记忆水平的调节,实现了对生物视觉感知功能的初步模拟 (Bioinspired flexible, dual‐modulation synaptic transistors toward artificial visual memory systems. Adv. Mater. Technol. 2020, 5, 1900888)。

图1 基于氧化锌纳米线和海藻酸钠制备的具有光感知功能的柔性仿生突触晶体管
在神经信号传递过程的模拟方面,研究人员通过器件材料的选择和优化,结合生物痛觉感知机制,以掺杂高氯酸锂的聚氧化乙烯(PEO: LiClO4)和半导体型单壁碳纳米管(s-SWCNTs)为沟道材料,制备了双层结构的忆阻器人工突触器件,实现了对生物痛觉传递和感知功能的模拟 (Bio-inspired flexible artificial synapses for pain perception and nerve injuries. npj Flex. Electron. 4, 3 (2020))。器件受到脉冲电信号刺激时,轻度刺激(<1.4 V)会使突触后信号增强,较强刺激(>1.4 V)会抑制突触后信号。这些行为类似于疼痛的感知、传递以及神经系统的保护功能。器件工作的主要原理是PEO: LiClO4的载流子与s-SWCNTs中的官能团、缺陷之间的相互作用。具体地,轻度刺激时,突触后信号的增强是由于载流子的迁移和对缺陷的填充来实现的;刺激较重时,较大的电压会导致Li⁺嵌入到s-SWCNTs中,使载流子的运动受到限制,载流子浓度降低,从而导致突触后信号的减弱。
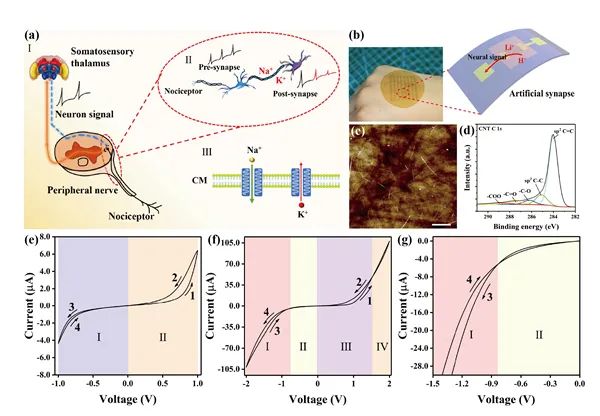
图2 PEO: LiClO4/s-SWCNTs构成的模拟生物痛觉传递和感知功能的柔性人工突触器件及其痛觉感知功能的实现
信号处理作为仿生感知系统的重要组成部分,对系统性能的有着重要作用,因此,研究人员通过对生物神经系统中的G蛋白受体信号传输过程的模拟和上述双层结构忆阻器的优化设计,制备了由还原氧化石墨烯(rGO)和壳聚糖(CS)构成的忆阻器柔性仿生人工突触 (Biological receptor inspired flexible artificial synapse based on ionic dynamics. Microsyst. Nanoeng. 10.1038/s41378-020-00189-z)。CS中的质子和rGO中的官能团分别对应生物体中配体和受体的作用机制,载流子在官能团的跃迁作用产生了沟道电流,但由于受到 rGO 中缺陷的限制作用,器件呈现出空间电荷限制电流(SCLC)的导电机制。通过不同强弱程度的电信号刺激,可以对器件沟道特性进行调控,实现对生物突触短期可塑性和长期可塑性的模拟以及类似人脑的记忆和遗忘功能,此研究工作有望为类脑信息处理系统的构建提供研究基础。

图3 rGO/CS构成的双层结构忆阻器柔性仿生人工突触及其基本突触性质
基于上述研究成果,研究团队在《材料导报》发表了受邀综述,题为“柔性人工突触:面向智能人机交互界面和高效率神经网络计算的基础器件和材料” (材料导报, 2020, 34(1): 1022-1049.)。对人工突触器件发展现状、潜在应用和瓶颈问题进行了阐述,并结合团队研究成果,提出了柔性、低功耗人工突触器件在仿生感知领域的潜在应用。
以上相关成果主要作者是中科院苏州纳米所陆骐峰博士和博士研究生孙富钦,通讯作者为张珽研究员。上述工作得到了科技部重点研发计划、国家自然科学基金,江苏省杰出青年基金、中科院脑科学与智能技术卓越中心等支持。
-
最新人工智能硬件培训AI 基础入门学习课程参考2025版(大模型篇)2025-07-04 2484
-
面向对象的汽车制动系专家系统及其知识库的构建2009-12-02 3993
-
柔性可穿戴电子器件取得进展2018-09-21 1680
-
【 平头哥CB5654语音开发板试用连载】基于外骨骼的仿生机器人控制系统2020-02-25 1030
-
对结构体成员进行了赋值2020-03-23 1963
-
柔性可穿戴电子器件的最新进展2020-07-30 1829
-
《通用人工智能:初心与未来》-试读报告2023-09-18 1279
-
面向目标跟踪的传感器网络设计、实现和布局优化2010-12-31 388
-
Ascent和IBM合作进行了一项人工智能试验2020-07-22 2254
-
柔性可穿戴电子器件取得了技术创新2020-12-25 992
-
华东师范大学在柔性人工突触器件取得重要进展2021-04-16 4663
-
基于人工突触器件的智能仿生感知系统面临的问题与挑战2021-04-25 4059
-
同时实现突触和光学传感功能来构筑视觉神经突触器件2022-10-24 2830
-
智能驾驶感知系统测试技术详解2023-05-17 2010
-
仿生型人工骨膜及柔性电子器件制备及应用研究2022-06-06 1773
全部0条评论

快来发表一下你的评论吧 !
