

ARM嵌入式系统的异常及裸机开发设计
电子说
描述
1、ARM的异常
异常在嵌入式开发中是很常见的事件,它也是非常重要的事件。简单来说,异常就是一种会打断程序正常执行的事件。异常通常又称为“中断”。
异常的种类大致可分为如下几种:
1、中断
IRQ / FIQ 由外部硬件触发的中断。
2、软中断
soft interrupt 由系统调用的中断事件,由软件产生的中断事件。
3、复位
Reset
4、未定义指令
5、数据异常
例如数据越界等。
中断:
ARM 有两级外部中断:1、FIQ;2、IRQ。
但大多数的嵌入式系统都有多于两个的外部中断源,为了能正常响应所有的外部中断事件,就需要一个“中断控制器”。
嵌入式系统的中断响应架构大致如下图所示:
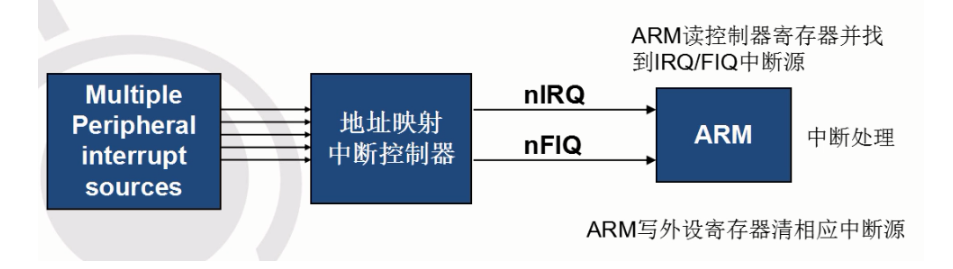
当在短时间内产生大量中断事件时,CPU无法保证能及时响应所有的中断事件。为了避免发生丢失中断的问题,每一个中断事件都会作一个“记录”,即我们常见的设置“中断标志位”。当CPU查到中断标志位的值有效时,就会发起一个中断事件。当然,一个中断事件我们一般只需要处理一次,因此,通常我们要在中断处理函数中将对应的中断标志位作清除操作。
ARM 系统会有一个“中断向量表”的机制来专门存储中断响应函数地址。
2、裸机开发
什么是祼机开发?
祼机开发就是指在嵌入式开发板中,直接编写程序控制硬件设备的开发模式。在开发板上没有操作系统,板上各种内围、外围硬件资源均由需要使用到它的程序来全权操作。
祼机开发除了软件编程能力,还有一个很重要的就是要能看懂硬件电路图以及各种芯片手册。
在嵌入式领域电路图设计中,经常可以看到CPU管脚与某些设备不是直接相连的,而是要通过一个“三极管”来间接控制。这么设计的原因是为了降低CPU在控制各种外围设备时被外围设备的合计电流烧毁的风险。拿LED灯控制电路来说,一个LED灯通常都是供3.3v的电压,并接入一个 1k 的电阻。如此一来,LED灯在工作时的电流就约为3.3ma。若CPU的管脚直接控制LED灯的亮灭,当板上有大量LED灯同时亮起时,输入到CPU的电流累加起来就会比较大,CPU的发热也会水涨船高,烧毁的风险也更大。而通过一个三极管间接控制LED灯,就不会有这个风险,LED灯工作时的电流将不会直接作用到CPU上。
在电路图设计中,有一个概念非常常见:上拉、下拉电阻。它们是指在对应元器件的电路上外接一个或一组电阻元件。上拉是指电阻元件与电源相连接,下拉则是指电阻元件与地相连接。
ARM芯片往往都有很多的引脚,其中会有若干组 GPIO 引脚。GPIO 的全称是:General purpose input/output,可以简单理解为这些引脚就是专门给我们自由实现软件逻辑功能的。而为了节省硬件资源与开发成本,通常同一个芯片引脚还可以有多个功能用途。我们在编程时就需要首先确定好某个引脚的功能用途,然后才去设置引脚的值。因此,ARM芯片的引脚控制通常都需要操作到两个寄存器:
1、功能控制寄存器;
2、数值寄存器。
在软件开发过程中,首先通过功能控制寄存器设置好我们要用的引脚的功能用途,是普通GPIO模式还是其它功能,是输入方向还是输出方向。然后才是将对应的电平值写到数值寄存器中。
在编程编写完成后,需要编译生成可执行文件才能在ARM芯片上运行。
编译过程通常都使用 Linux 操作系统来完成。编译还需要使用到专用的“编译链”,即与要运行该程序的平台相匹配的 gcc 工具。PC 端的 Linux 系统默认的 gcc 是针对 x86 架构芯片的,用它所编译出来的可执行程序只能在 x86 架构芯片上运行。而与平台相匹配的 gcc 工具需要自行下载安装,或者可以询问芯片厂商索要。
ARM裸机开发模式还被称为“交叉开发环境”。它是指程序的开发与运行是分开完成的。通常我们都使用PC来编写、编译程序,然后再将编译生成的可执行程序下载到开发板中运行。这种开发环境就叫“交叉开发环境”。
有些开发板在出厂时会预置 uboot 程序,在 uboot 模式下可以直接通过 loadb 命令将程序下载到开发板内存中,然后再通过 go + 内存地址 这条命令来运行我们的“裸机程序”。当然,这种模式不是所有的 ARM 开发板都支持的,具体要看厂商是否有提供这个功能。
-
基于ARM核的嵌入式系统异常处理机制的设计2023-10-27 507
-
什么是裸机开发与linux嵌入式开发2021-11-08 1608
-
ARM嵌入式系统2021-10-20 1591
-
【嵌入式】基于ARM的嵌入式Linux开发总结2021-10-19 2263
-
ARM嵌入式系统开发_Android应用开发入门(基础版)2021-08-04 2456
-
嵌入式系统裸机编程的内存管理简介2020-12-28 4130
-
《ARM嵌入式系统基础教程》下载2019-04-04 2710
-
基于ARM的嵌入式系统程序开发要点(1)2017-01-14 745
-
嵌入式系统设计与实例开发—ARM与uC/OS-Ⅱ2016-11-08 913
-
ARM嵌入式软件开发2016-01-15 1452
-
嵌入式ARM系统原理与实例开发2015-12-29 763
-
ARM嵌入式系统开发-软件设计与优化2010-02-11 859
-
基于ARM的嵌入式开发2009-10-04 2041
全部0条评论

快来发表一下你的评论吧 !
